The year 2018 was interesting in relation to the rubber hand illusion subject.
I had participated in an extensive interview study regarding embodiment just a year before [link]. Then, I had been identified as a prosthesis “super user” [link] – these people wanted to investigate my type of “embodiment” through fMRI, but we quickly identified my prosthetic arm design (not my brain) as the key aspect regarding the question of why I have a prosthesis that I can actually use rather than just pose with as so many others. My own view here clearly is that if you are after embodiment, you have to go all Sherlock Holmes, you have to go all forensic, all CSI and all crime mystery: and as in “cherchez la femme” when looking for a motive in a crime, it is “cherchez le bras” when studying embodiment: for all issues that center around prosthetic use, go for the core physical aspects first. There are extremely bad things that may, can, and will happen if you do not make that your real first priority. The “rubber hand illusion” is an extreme variation of body ownership of a rubber hand that does not even touch a person and still that person thinks they are being touched if that rubber hand is touched. The illusion to make an amputee believe they embody or bodily own a prosthetic hand is quite different. But both pose risks, whereas the risk that an amputee faces when getting a prosthetic arm that is integrated into his body image has not been considered yet. My slightly experience based consideration proposes that the body image is tyrannically governed, for good and for bad, and if the prosthetic body part – already starting with bad cards, body image wise – craps out, and it always does so far too often, then it draws the hot red angry ire, the depressed disappointment, the falling apart of the cyborg body, of the amputee – and definitely not the cool “oh a neutral object just disintegrated” that one will wish for from a societal, insurance or repair view. The integration into a body image brings with it that the device becomes subject to totally tyranically governed bodies. When it is difficult enough to make any device ready for real world usage, making it ready to survive tyrannies of that nature will be even harder. I proposed an unforgiving approach to failure testing in a recent paper (link) but I cannot say that paper has been greeted with any enthusiasm by the industry that actually builds prosthetic arm components. Because they get to directly face the anger, hate, and rejection of all the users that they had not informed well of just how fragile their prosthetic arm parts really are (link), and they are in absolutely no position to technically improve these parts. So, manufacturers go into hiding. They do not want many users – they want users that buy and do not complain. The last thing they need is a hard bright unforgiving look into just how bad their engineering is. Every non-user, every rejector, should be cautiously left alone, not recruited to wear a prosthesis – because the risk is considerable (link). Researchers currently have the problem that amputees run away, everywhere (link), also because we are continously treated as mentally incompetent. So in essence, we are a group of people that increasingly realizes the extent to which we are being fooled, being had, told stories, and increasingly, we are getting critical. Potential rubber hand illusion switches, dragged to market to be soldered into prosthetic arms, if ever they are a medical treatment or a part thereof, will have negative effects as well: what are these? What do we know about deeply problematic aspects of bodily ownership? I had been invited to talk about that aspect for a group of people interested in robotic control and user interfaces, on December 7th 2018, in Mannheim (Germany). The presentation that I gave now is typed out here in more detail for further reference.
Rubber hand illusion is an idea that, by and large, was somehow transformed into multi-sensory rubber hand illusion, and they now want to put it into prosthetic arms to make users believe the prosthesis belongs to their bodies. There are a number of serious caveats with that belief: first of all, rubber hand illusion are now suggested to be subject to suggestion effects, and thus may not be actual “evidence” in a strict sense of a true neurological phenomenon with a reliable neurological foundation [1]. Secondly, arm amputees may not embody any hand-like, or anatomical extremity-like, representation of their prosthetic arm, at all, but, instead, it appears that they actually embody a prosthetic arm as a distinct entity [2].
With that, rubber hand illusion goes to market[ref]As in: piggy goes to market.[/ref].
This is not really that fascinating.
While I am not interested in prosthetic arms because I find the field fascinating, I have been drawn into the field due to circumstances. And as much as you feel that I am locked into this constraint space of shared idiocies, dreams, hopes and failing hardware together with you, in some type of brotherhood by bad fate, you may also realize you are locked into this with me, as consequence of bad fate. Those then are also circumstances. As I deal with it, you may also have to find a way. If you think that is uncomfortable, send me a mail, so we may talk about uncomfortable a bit.
The ultimate consquence of this piece of reflection is not at all bad, however. We will see just how too much “ownership” has bad aspects as well. It risks to slip prosthetic hands into a domain where it is subject to the most vicious decision making that there is: tyrannic and wilful, impulsive and emotional decision making within one’s own very personal domain of body or body image with owned body part dependent urgencies and requirements. To withstand these storms, a prosthetic arm has to withstand not only the physical requirements of real life use (which it normally does not to a degree that will make your jaw drop), it also has to be acknowledged in that capacity by manufacturers and care-givers, emergency teams or repair units, where none of similarly urgencies are currently provided.
To even reach a level of “tool”, to be useful enough to be accepted as technical solution (not as embodied “owned” limb), a typical prosthetic arm may have to undergo a most serious metamorphosis, from commercial parts (link)(link) to tuned and optimized parts (link). If you are in R&D and want to do something good in support of arm amputees, it may be relevant to address actual issues such as failing devices or phantom pain (link), before going all out on a limb and drag ill-defined concepts to a domain where they may wreck more than they really help.
The rubber hand illusion is dragged into prosthetic arm use by way of slippage, and slippage causes “rubber hand illusions” to become “shoes to be stepped upon” not in multi- but two-way sensory feedback
What is slippage: it is a “cross-label use” of concepts
Slippage describes the process of a professional aspect, expertise, concept or strategy, valid in one domain, getting dragged to another domain, where it may cause all kinds of, mostly very subtle, strange and otherwise weird issues. The underlying problem is that the premises are not carefully checked, and that in fact a technical cross-label use occurs. The term slippage therefore denotes a re-use of a concept outside its original scope and comes with caveats attached to cross-label use generally, but as it remains a theoretical problem first with subtle practical issues later, its recognition on a cognitive level is key. Because arm amputees are widely regarded as comprehensively incompetent [link], and because no one else cares enough, it seems to be assumed that no one notices.
Slippage, however, has become a cited and referenced issue in forensics [3], and you can read it up there. Literature mentions issues such as concise relevance, perceived need, reliability, impartiality, safeguards and warnings (also such as offered here, by me). To immediately step into this particular hermeneutic circle: trying to push body ownership of prosthetic arms within amputees’ brains raises the question of how “owning” a prosthesis causes negative effects. The answer will be that, in a way, making an issue or thing “your own” risks to do away with a more technical consideration of a project idea, thus foregoing emotional distance and neutrality, impartiality and thus a clear mind, as technical aspect with great advantages, and that is where such considerations will be quite relevant also in that context. On a meta-level, an overly invested ego-centric [4] ownership of such a “prosthetic hand idea” also is a rubber hand illusion of sorts, where such “ownership” may have the same effects: that is, neutral, ice cold and logical aspects risk to remain unconsidered, un-reflected and not addressed. We even might first consider the negative effects of a rubber hand illusion on such meta-levels before showing how rubber hand illusions may be detrimental on an amputee user level – but then, we just might not : ) But let us not jump to what follows over this blog post, but got step by step.
How does slippage apply to rubber hand illusion as bodily disjunct apparatus, that now becomes a tag name in bodily attached apparatuses, whereas prosthetic arms are supposed to provide “multi”-sensory feedback as a new thing?
What is the proper rubber hand illusion?
The rubber hand illusion as concept employs a device shaped and sized like a human hand, but made of rubber (or such), that is entirely disjunct from a human body, but visually linked to a person through experimental tricks.
The diagram here shows how the true rubber hand illusion uses a rubber hand that nowhere touches the person that is tested. Ownership is inferred only visually.

(C) Copyright authors of study / Google Images referenced image
Thereby, the person to succumb to the rubber hand illusion will think they, themselves, are getting stroked or touched, if really, the investigator strokes or touches the rubber hand. Clearly, the fact that a rubber hand is made of rubber, per se, is not a necessary requirement for the illusion to be that. It could be a wooden hand, or a metal hand, or one made from any other material. It is a specific technical requirement for a rubber hand in that context to be bodily disjunct, and that illusion is so astonishing because of that, because of just that actually. It is the disjunct bodily aspect that makes the rubber hand illusion – which means that anything else is not that.
What is the rubber hand illusion not: the concept that happens once you take it to the market to work for prosthetic hands
What happens currently, is that the rubber hand is a tag also applied to prosthetic arm designs that contain some added features that are termed multisensory feedback whereas in reality, even that feedback is not even overly multisensory, if one is to be precise also there.
So, the bodily disjunct rubber hand as concept is dragged all across the market to now contain and describe a prosthetic hand, foregoing its core property, that is, being separate, disjunct, from the “owner”.
It is unfortunate that “rubber hand” seems to be an ubiquitous term in that anything that looks like a hand and is of rubber can be a “rubber hand”.
Therein consists slippage, as it loses the original clean pure ingenuity attached to “bodily owning a disjunct item”. Disjunct means just that: it is the same as “fully disjunct”. However, as one cannot be “almost honest”, there is not “fully disjunct”. The term disjunct means, separate, no overlap. It is sufficient to describe the operative aspect of the rubber hand illusion.
When using the term of rubber hand illusion in the context of “multi-sensory” feedback: what is “multi”?
To call a prosthetic arm feedback truly “multisensory”, from a user view, something extraordinary would have to happen, such as extra senses being served: sound, smell, ears, that sort of senses.
So we want to re-term the “rubber hand illusion” to be what it really is in context of a prosthetic arm: pain and regular prosthetic arm feedback as experienced with a good body-powered arm are not a disjunct bodily illusion experience.
They are far more in play with a “step on my shoe – feel stepped on my toes” tag which connotates a more correct term for what a prosthetic hand is that you, as researcher, may want to bang against, strike with force, to elicit a response of me.
Furthermore, feedback restricted to visuo-tactile feedback is to be termed that – as in one, two, three, many: “visuo-tactile” is not “many”, leave alone “multi”. So visuo-tactile feedback, at best, could be termed two-way sensory feedback.
Obviously that sounds lame. But, guys, it is.
Aspects of visuotactile feedback of current prosthetic arms
Regarding feedback and ownership, prosthetic arms already have visuotactile feedback.
If you want to increase that in amplitude, you could also try to improve visual feedback rather than just focusing on installing skin buzz.
You read that right. Improve, increase, turn up visual feedback. You know how that is done, right?
A hand with all its fingers, as a prosthesis, is one big visual obstruction, particularly if you are after that one grip that pulls the prosthesis out of functional oblivion, the precision grip.
If you cut away all parts that impede, visually, you get what?
You had to come here to read that, right? You read that here first, you hear: you get a prosthetic hook.
Now you wonder how all the really intelligent amputees go and work hard with true efficiency? Have you wondered for a long time? Many of us fall back on using the admittedly ugly, strange looking, prosthetic split hooks. We do that for good reasons: because what remains, at the end of the day, is the sum of all stress aspects over that day.
Here a user view of a prosthetic hand obstructing its fingers visually. Cannot be “owned” that easily because its visual feedback is not so good as part of its design-inherent bulkiness. In more detail, you can see how the middle finger that is mostly outside the view of the user (camera was slightly left of me) messes with the objects without me seeing it really, so without me being able to “own” and truly control the process.

Here, a hook that is not obstructing its fingers visually, can be “owned” easier as it provides a far better visual feedback.

The TRS Prehensor has, like the hook, great visual feedback and can thus be “owned” easier if one is to believe in visuo-tactile-feedback as the pinnacle of “step-on-me-toes” related “bodily ownership”.

In what way are phantom pain and “multi-sensory” feedback related? – not too much if you ask me.
Phantom pain, at least in my instance, does certainly not benefit from electric electrode mediated sensory feedback – that made it a lot worse [link]. Also, mirror therapy made it worse [link]. It is also known that rubber hand illusion as such, i.e., visual feedback mediated ownership, does not reduce pain either [5]. So it is not the rubber hand that reduces pain, it is touch or something else. So in itself, it may be more relevant to try to understand rubber hand ownership in its pure form [6]. At best, any extra-buzz-generating prosthesis may have a weak effect on phantom pains similar to trans cutaneous electrical stimulation (TENS).
My assumption is, that these studies never take into account that a prosthetic socket will always compress the stump in some way [link], and, muscular activity in the stump as such may improve blood flow as the possibly most relevant aspect. Furthermore, mental distraction – be it because of an attractive study nurse, or a nice setup, or compliments one might be given – goes a very long way towards effectively reducing the momentary perception of phantom pain.
As a bottom line, uncontrolled distraction and uncontrolled and unchecked vascular congestion in any arm amputee may significantly confound any rubber hand related or other such feedback-focused studies.
Comparing pure model view and real user view on rubber hand illusion vice versa actual prosthetic arm
From a pure model view, combining rubber hand model slippage with clear sensory count exaggeration (“multi”) is not exactly clean conceptual science. What appears to play into this here is a meta-level slippage.
| What the non-disabled person sees | What the non-disabled person may think is the case | What really seems to be the case |
| Right below elbow amputee | “This person is missing the right hand and wrist. As I visually see it, the impression is quite pervasive. It dominates what I see, visually. Surely, that being the only thing to see, visually, is the only problem there exists. Also, that person does not look quite as human as others that do have more hands. So I will conclude that the situation is fixed by giving that person “a hand back”. If the amputee rejects that, it can only be because they have mental issues [link]. I say this because my conviction is complete, I trust my senses, particularly my vision. If the amputee rejects that therefore that person must be tricked into using a prosthetic arm. Against their own will. Amputees have no own will, as they are misguided if not permanently unfit to judge. We do that for their own good. Really, it is for my own good, but we do not want to go there now.” | As this webpage further explains, prosthetic arms are difficult contraptions to finance, build, wear and maintain in a stable technical condition.
Their usual make is so poor, so far below any other consumer product standard, normally, that any other person would run away screaming bloody murder. This is not an exaggeration but a hard fact. |
| Rubber hand illusion is a neurological research setup to study embodiment when a rubber hand is not connected to a person but stroked, or touched. | A “rubber hand” is not just a neurological study concept that describes embodiment of a non-embodied rubber hand. Also, “rubber hand” is a term. There are other “rubber hands”. The most frequently encountered one is that of a person wearing rubber hand gloves, maybe for cleaning. Now, that is menial. That is low. That means detergents or smells. We do not want that. There are amputees that wear prosthetic hands that do have aspects of a “rubber hand”. They think these are not their own body. They have no lobby. They appear disenfranchised. Let’s go and use the term “rubber hand” there. | A prosthesis sits on my arm and generates feedback there. That it is on my body is not part of any neurological rubber hand illusion, but a fact. That it generates sensory feedback on my shoulder, stump, etc., by interacting forces and direct feedback, is a given. If you wear glasses, or a wrist watch, or shoes, you will have the same effect as when wearing a prosthesis.
If you budget, maintain, revise, and repair, re-tool and re-design your prosthetic arm as a tool and not a body part, it becomes manageable and a true asset. |
| When I perform interactive studies with amputees of any kind, their phantom pain gets a bit less. Not a lot, but a bit. | So when we place sensory feedback as electrodes and gives these a bit of a buzz, some amputees find that phantom pains go down. For others, it goes up (link), so we exclude these from our studies, must be something wrong with them, not our business. When we have them use some virtual reality setup, their phantom pain also go down a bit. When we use TENS, their phantom pains also seem to be a bit less. Who knows what is going on there. When the amputee finds out that their phantom pain is best treated by wearing compression on their stump (link), they are a spoil sport. They mess up our ideas of what should be going on (see below: adoption of research ideas as an own body part, in the sense of a rubber hand illusion). Surely there is something wrong with these amputees, on top of missing a limb. | Phantom pains are different in everyone. The common denominator seems a neuropathic pain from de-afferentiated nerves. I have a few small neuromas that are really sensitive and hurt, but mostly my pain seems to be blown out of proportion by tissue congestion due to reduced circulation.
This is a known problem causing phantom pains, but not in the focus of current research. Despite that, it is a clear fact that compressing my stump does away with almost all of the phantom pain (link). It is cheap and very effective. Buzzing, sensory feedback, extra signals on my skin, have massively increased my phantom pains as part of a study where I had participated once (link). Regardless of that, I am easily distracted and I actually use distraction intentionally to reduce the perception of phantom pain. It is very effective. Watching Monika Gruber perform comedy, buying some electronic trinket, reading a comic book, all help to distract, greatly. |
| We use a rubber hand with touch and visual feedback. Hey, that is “multi level” sensory feedback! | We are on the way to the future, finally building the cyborgs that were promised to us in the fifties, and that should surround us by now. The whole thing has stalled so far and really, some 85% of arm amputees do not even wear conventional prostheses. We have failed to make them into bioelectronically integrated organisms which was the plan since the fifties.
So we approximate cyborging by taking the next best thing, lowering our standards. |
We have a number of senses.
These are hearing, sight, smell, touch, taste, and equilibrium. A multi-sensory feedback, as a term, will combine more than two or three senses. Two? Two is two, not “multi”. A watch with just two functions is not multi-function. It shows time and has an alarm. Or, it shows time and it has a light you can switch on to read the time when it is dark. You can argue that even two are “multi”, but it is bloated, exaggerated and hyped up. The subliminal reality is that we have no cyborgs. Really, “multi-sensory” would denote a truly multi-sensory feedback that at least uses three but better four senses and more. And that is something no one wants:
But I guess you never figured someone would interpret “multisensory” as what it really conveys. This leaves a two-way feedback, that is, visual and sensory. As wearing body powered arms, and to a degree also myoelectric arms, already contain that, it is a bit superfluous to state that it has two-way (or using newspeak, “multi sensory”) feedback. Your shoes also have that, and it is boring as hell to make a drama out of it. That’s where it is at. If you add a buzz to it, call it “prosthesis with added buzz”. So we know that you know what it really is. |
Rubber hand illusion is replaced with a “step on toes / shoes” concept, which then gets termed “multi-sensory rubber hand illusion”
The bottom line is that the rubber hand illusion is now applied in prosthetic arm research where it really does not belong – the correct paradigm for prosthetic arms and their type of feedback may be better described by “stepping on my toes harder than ever before”, where really mostly other people will “step on my shoes harder than before”. Not the same.
It is necessary to be precise because we already get our stumps chafed, abraded, blistered up, torn up to smithereens, by the current setups.
You think adding feedback to an already chafed, red blistered, rash infested sharply paining arm is the way to go? Because, a lack of that feature is somehow bad for business of your associates, maybe, prosthetic industries or prosthetic technicians? What is the underlying true motivation? Will it be hard to investigate that? Will you let us see what truly motivates you?
But if you have a stump such as my stump usually looked after 1-2 days of prosthesis real use in the past, and still does, on occasion, after some prosthetic use beyond the normal (see quite visual images further below), where every tiny wiggle is not just a bit of research level sensory feedback but may even be a truly painful with occasionally itch and sharp pains abounding, you think I’m a crying my eyes out at night for even more “multi-sensory feedback”?
Or to word out that parallel aspect again: my stump is both itself painful and there are constant phantom pains (link), and wiggling or touching my prosthesis with sufficient force or displacement clearly infers a degree of sensory feedback. While it is not precise in any demanding precision-work like terms, getting it more precise seems neither necessary nor really comfortable. Is there a point in pain where you agree that enough is enough?
I do feel where stuff is, with the prosthesis, and I do not think for a minute this prosthesis is my owned body part in that it is truly mine, mostly because the hook is sufficiently ugly, it keeps this feeling remote, absurd even. Motion-wise, dynamically, the body powered hook is functionally integrated alright, I mean, wear our perfected setup for five years and see what that does to you : )
So the actual feeling of having someone propose an add-on feature for a prosthetic arm that blisters my arm stump up even more will be correctly termed as “step on my shoes”, “step on my toes” or even “burn up the stump completely”.
The images below show my arm stump after light typing for 10 hours at the office wearing my iLimb myoelectric arm without added buzz-/electrode signals for extra feedback. I will need very good justifications from everybody on just exactly how any increase in use, adoption, integration into body ownership, of these issues help the case. Was it about me? Was it about any other arm amputee? What was it about?



Bodily attached apparatuses such prosthetic arms already, anyway, provide visual and tactile feedback, so there is no actual illusion in that
Any body powered, cosmetic or passive, as well as myoelectric prosthetic arm regularly and routinely provides both tactile and visual feedback as long as one builds it in a normal way (i.e, hard socket, thin liner, prosthetic hook, stiff coupling) [7, 8, 9].
If one builds it differently (i.e., thick soft gripper covers for massive grip force) then one somewhat reduced direct touch feedback – but technically, shifting between harder sensory feedback and less sensory feedback as a price paid for more powerful grips with softer padding is normal within the small constraint space of well performing prosthetic arms (link).
While the rubber hand illusion thus seems to represent a neuro-psychological construct, it succumbs to profane slippage when applied to prosthetic arms that actually already do transfer additional tactile feedback on top of just being controlled visually.
My prosthetic arm will, as it is, with body powered control, tell me about the feedback aspects so I can control it in real-time (you read that right) with sufficiently subtle grading:
- It will let me know when I touch or hit something, it is hard carbon fiber with steel wrist and steel hook, so really, a bump will be a bump.
- I blindly type faster than many (5+1 typing system on keyboard).
- I drink from a plastic cup.
Here, Swiss televison shows a professional user and employee of the iLimb company (Touch Bionics, Ossur) how her actively exerted lack of control squashes a plastic cup, next to two interested gentlemen.
To successfully drink from a plastic cup, one just has to pay a bit more attention.

(C) Copyright Swiss television SF DRS
Here (below), I use a body powered voluntary closing Toughware Equilux to drink from a plastic cup.
So much for two-way sensory feedback, realtime control and where technology is at.
You want to seriously tell me we have no sensory feedback in our arms, and of all things, let you twiddle with it? Seriously?

What might be the urge for research to have amputees integrate overly faulty prosthetic parts into their body image? Why might that move be a bad idea?
The idea of dragging the rubber hand term across the market, to get the amputee now equipped with extra sensory feedback systems on their prosthetic arm, will be to integrate these prosthetic arms more into their own body image.
That is because researchers feel amputees may not sufficiently integrate prostheses into their body image at this stage. That is an illusion in its own right.
The idea to use neuro-psychological trickery in an attempt to better integrate prosthetic arms into the body image of users can only be the clear goal to sell more prosthetic arms, to generate more users among the 100% of potential and existing users.
However, with a realistic 85% of rejectors within that group, that is not a population that will take faulty ill-designed produce happily.
The adoptors of prosthetic arms (15% of potential users) will by the very outset be the ones that have no problems having their arms chafed up, their time mauled away by permanent repairs, their finances eaten up by travel or other expenses.
The 85% non-users are the ones with challenging (at least to you) product demands, they are possibly the ones that are more emotional and impulsive, they will be in a way alive that may be hard to grasp for any researcher or industrial parts developer (otherwise they would have acted differently already).
So if you assume that the rejectors and adoptors are a homogeneous mass, ready to be manipulated, the future will be wild, and very active, with things really happening (link).
How body image and prosthetic use are, now, from a user perspective, in relation to integrating a prosthesis into one’s own body image
Personally and from my own gut feel, us arm amputees tend to, risk to, hope to integrate prostheses into their fantasized, idolized, hoped for or temporary body image far too much.
Then, far too early into that experience, the prosthesis dies, because no prosthesis is anything else but pure crap, technically, when seen from a real working user perspective.
The path into wearing a prosthetic arm is that, after the amputation, you first feel entirely cut up, disfigured, and in more than one dimension of deep pain.
You then at some stage sit at the prosthetist office where you see the “options” of prosthetic arms. They show you cosmetic, body powered, hook, rubber hand, myoelectric hand.
And I tell you you want to puke right then and there.
These prostheses appear all so ugly and dysfunctional, you feel nauseous immediately.
The feeling of potential, hoped for and wished for bodily ownership of a prosthesis by far precedes any correlate, any real arm.
You go and hope for that. It is your deepest wish.
Only, as a potential user or as amputee, I do not control that ownership part. The prosthetist also does not control my ownership feeling. Due to the body image being governed by love and hate, tyranny, and truly impulsive ego-centric [4] deep decisions, the prosthesis gets also rejected far harder, harsher, far more impolitely, far more sudden, abrupt, far more direct and unforgiving, than any engineer would want their contraption to be tested for improvement.
So once you agree to adopting one of these butt ugly arms as your own, you will be appointed not once, not twice, but all the freaking time because these parts crap out so much, and under such unacceptable conditions, that it is worthwhile discussing these, under the aspect of bodily ownership, below. It is the exercise for you here, to understand the deep hope for ownership that is pushed back with physical violence, with temporal arrogance and very cold hearts, with “customer service” experiences far below the quality of normal everyday consumer products. I do understand that the market is small, but you are in the awkward position to make believe that bodily ownership given built-for-obsolescence produce is in some way constructive.
An overly exaggerated or emphasized feeling of body ownership, directed at a prosthetic arm, risks to have very negative consequences. It feels bad if one allows it because it back-fires.
It messes up a more constructive path to wearing a prosthesis.
Prostheses, when built and worn as a tool and not as a body part, may be, potentially, great achievements. The problem is that almost no one builds these as tools: as we will see, there appear to be mostly no true engineers on the meta levels of prosthetic hands. These meta levels of rubber hand illusionism describe the relationship not to bodily “owning” a prosthesis as a user or amputee in a direct way, but to “owning” a project or owning the building process of a prosthetic arm. There, we also have a kind of rubber hand illusion – i.e., “it does not really touch us but we believe to personally own this”: focused on research, development and prosthetic technician level, where similar tyrannic, impulsive, ego-centric [4] decision making messes up the groove on the path to a truly more glorious future.
If you are a deep believer in body-ownership of a prosthetic hand, a bodily rejection should be right down your alley.
Then, my first deep nausea and feeling repulsed would be a great indicator for you that no further research is needed.
Then, as amputee, I already integrated the prosthesis into my body scheme, where, of course, it got expelled as a body part. But that is what you must allow once you want body ownership: body rejection. Full rejection. Hate. Aggression.
Sensory feedback as alleged “wish of users”: citation analysis
Research in itself seems at times questionable when citing sources as apparent justification for sensory feedback type research.
Even if you use your most distinguished language: if you write suggestions for truths that lack any, I may see through these before actually checking all referenced papers suggested to support your claim.

(C) Copyright Monty Python
Example 1: Dhillon et al. trying to argue that user acceptance is significantly enhanced with more electronics or so
I am not sure who is the person to generally agree here. Myself, I agree with different statements seeing as we already have limited but sufficient sensory feedback if the prosthesis is built right.
Dhillon, Gurpreet Singh, and Kenneth W. Horch. “Direct neural sensory feedback and control of a prosthetic arm.” IEEE Transactions on Neural Systems and Rehabilitation Engineering 13.4 (2005): 468-472 [10] : “It is generally agreed that (..) user acceptance of modern artificial limbs by amputees would be significantly enhanced by a system that provides appropriate, graded, distally referred sensations of touch and joint movement [1]–[8].”
That seems not to be at all the generally agreed upon conclusion.
(1): Atkins, Diane J., Denise CY Heard, and William H. Donovan. “Epidemiologic overview of individuals with upper-limb loss and their reported research priorities.” JPO: Journal of Prosthetics and Orthotics 8.1 (1996): 2-11. In that study, sensory feedback or touch are not mentioned.
(2) : Jacobson, Stephen C., et al. “Development of the Utah artificial arm.” IEEE Transactions on Biomedical Engineering 4 (1982): 249-269. Sensory feedback or touch not investigated and not mentioned.
(3) : Northmore-Ball, M. D., H. A. N. N. A. Heger, and GORDON A. Hunter. “The below-elbow myo-electric prosthesis. A comparison of the Otto Bock myo-electric prosthesis with the hook and functional hand.” The Journal of bone and joint surgery. British volume 62.3 (1980): 363-367. – Here, users stated that electric prostheses gave better sensory feedback than harness / cable powered prostheses. Lack of feedback as an issue was neither reported to investigated.
(4): Rohland, T. A. “Sensory feedback for powered limb prostheses.” Medical and biological engineering 13.2 (1975): 300-301. – Actually this study reports a test in that 2 amputees found the feedback helpful. Two 13/17 year old girls with congenital limb difference thought that added / extra sensory feedback was cool to have.
(5): Lotze, Mi, et al. “Does use of a myoelectric prosthesis prevent cortical reorganization and phantom limb pain?.” Nature Neuroscience 2.6 (1999): 501. – Sensory feedback or touch not mentioned.
(6): Sears, Harold H., and Julie Shaperman. “Proportional myoelectric hand control: an evaluation.” American journal of physical medicine & rehabilitation 70.1 (1991): 20-28. Sensory feedback or touch not investigated and not mentioned.
(7): Stein, R. B., and M. Walley. “Functional comparison of upper extremity amputees using myoelectric and conventional prostheses.” Archives of physical medicine and rehabilitation 64.6 (1983): 243-248. Sensory feedback or touch not investigated and not mentioned.
(8): Dhillon, Gurpreet S., and Sanford Meek. “Challenges to developing a neurally controlled upper limb prosthesis.” Neuroprosthetics: Theory and Practice. 2004. 1005-1034. – This paper just hopes the authors can some time build some neural interface.
Example 2: Geng et al. trying to argue that lack of sensory feedback is among the most cited reason for abandoment of limb prostheses, but lacking support of the citations they picked
“However, despite its widely recognized importance, the lack of sensory feedback remains a major obstacle towards a fully functional prosthesis [2], [3]. This is among the most cited reasons for abandonment of limb prostheses [4], [5].”– Geng, B., Dong, J., Jensen, W., Dosen, S., Farina, D., & Kamavuako, E. N. (2018). Psychophysical Evaluation of Subdermal Electrical Stimulation in Relation to Prosthesis Sensory Feedback. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 26(3), 709-715.
It pays to actually read these in disbelief. I know how it feels to reject a prosthetic arm, there are literally tons of reasons to reject them. This statement does not even ring true from a distance, not with great empathy for the absurd. This is just plain wrong, has to be – so this was easy, I just had to look them up and I knew beforehand they could not be correctly cited:
- [4] E. A. Biddiss and T. T. Chau, “Upper limb prosthesis use and abandonment: A survey of the last 25 years,” Prosthetics Orthotics Int., vol. 31, no. 3, pp. 236–257, 2007. This study does not investigate any rejection reasons, it just lists rejection rates.
- [5] K. Østlie, I. M. Lesjø, R. J. Franklin, B. Garfelt, O. H. Skjeldal, and P. Magnus, “Prosthesis rejection in acquired major upper-limb amputees: A population-based survey,” Disability Rehabil., Assist. Technol., vol. 7, no. 4, pp. 294–303, Jul. 2014. – This study does not even contain the word sensory feedback as prosthetic property. It does not therefore list it as rejection reason.
Examples 3: a better reflection of the actual reality of sensory feedback, from my own experience, is worded out here
There are other studies where it appears the authors got it right.
- Body-Powered Prosthesis Performance – A general result of these experiments is that experienced subjects who continue to use their prostheses daily were able to position their prostheses almost as well as their unimpaired arm. In the blind pointing task, two subjects (the youngest and most frequent users) attained similar means and standard deviations; two (less frequent users) had similar means but larger standard deviations; and two (an infrequent and an inexperienced user) had both different means and larger standard deviations. — Doeringer, Joseph A., and N. Hogan. “Performance of above elbow body-powered prostheses in visually guided unconstrained motion tasks.” IEEE Transactions on Biomedical Engineering 42.6 (1995): 621-631.
- Although the use of externally powered prostheses is increasing, current estimates are that 90% of arm amputees who wear prostheses use the body-powered types because they are relatively inexpensive, functional, reliable, and have some sensory proprioceptive feedback from the shoulder harness and cable-control system. —Muilenburg, Alvin L., and Maurice A. LeBlanc. “Body-powered upper-limb components.” Comprehensive management of the upper-limb amputee. Springer, New York, NY, 1989. 28-38.
- Control theory teaches that without feedback the control of systems subject to external disturbances is very difficult. The control of the sound human hand is very good as a result of the many feedback paths present. If a hand is missing, many of these feedback paths are lost. Hence, it is of the utmost importance to utilize the feedback paths still present. Here the concept of extended physiological proprioception comes to our aid. Simpson introduced this concept in 1971 [29]. He depicts the prosthesis as a mechanical extension of the natural system of the human body. Common examples of such mechanical extensions of the natural system are the white stick of a blind person, the golfer’s club or the way we use a hammer [29]. — Plettenburg, Dick H., and Just L. Herder. “Voluntary closing: A promising opening in hand prosthetics.” Technology and Disability 15.2 (2003): 85-94.
We are not free in the feedback that we give, as amputees
The academic idea to use neuropsychological trickery also seems to be based on the notion that some amputees apparently wrote down “lack of sensory feedback” when filling in rejection reasons on forms for their prosthetists.
That should be interpreted as an excuse, not as a valid research premise.
Circumstances contain sufficient anecdotal evidence that implies that prosthetists do own us, and they may even leave anecdotal evidence that implies that they believe to own us and they occasionally seem to act accordingly. The sensory feedback was never meant to be taken seriously when all we wanted to achieve was filling in the form, rejecting the prosthetic arm without provocative answers. We are not a truly free client group, happy to speak our mind. The construction, making, generating or assembly of a prosthetic arm in itself seems to succumb to a strange type of extra ownership, that I will address further down: a meta-level of rubber hand illusion as “slippaged” into prosthetic arm industries appears to exist. Examining these is relevant because it shows that a rubber hand illusion on a meta level appears to have effects that are interesting to consider also on a direct rubber hand use level. Last but not the least, prosthetic researchers also want to identify brain scan peculiarities of what they regard as super users, people that really wear their prosthetic arms and adopt them as viable tools for orthopedic support. My view is that all that is needed is a prosthetic arm that actually works on an acceptable level of function, comfort and robustness integrity-wise and that is not a reality for most real users, as none work out of the box, none work as made by conventional means, if you are in a physically demanding line of work.
When I started to need a prosthetic arm, I immediately realized just how skewed the situation was, vice versa insurances and the prosthetic technicians. It started by my prosthetist building a first prosthesis that was clearly too long, by around 3 cm or so (link). He insisted there was no other way. I first asked them, and other local prosthetists that I then visited, whether they would take any negative product feedback very personally, feel offended and call competing prosthetic technicians to bad mouth the client, and “warn” other prosthetists, and three out of three answered, yes, they would do that and they would imagine that the others would, too. Two of three laughed when they said it. So I went ahead, called insurance to block or stop payment. Then I told my prosthetist that payment was stalled until they got the length right. Ultimately they fixed it. Later I had to show them how to really mount the pin lock and wrist to get the correct length (link). Subsequently, I got lied to in my face. One was the Otto Bock battery issue (link). I had asked my prosthetist whether four AA cells would work and he said, no. So I insisted that he would still go ahead and mount these on my provisional prosthesis. It worked perfectly well (link again). I asked him why he said they would not work. He said, he’d try to see whether I believed it. He knew 4x AA batteries would work just fine. Another prosthetist that got to service my control cable was advised by me on exactly how to do it. He messed up and lied about it. Not exactly an overall situation that makes for a relaxed customer-prosthetist relationship, generally.
So, by and large, you cannot expect the average user to give any free honest true feedback.
Putting down “no sensory feedback” sounds like a perfect excuse that allows everyone to save face. That is, until someone goes and thinks this was meant seriously and starts putting more parts into the already jammed myoelectric arms, riding the already dead horse with decades of research (link) that failed to make the technology function for real work (link) into future decades of such research.
Is integration of a prosthetic arm “as a tool” rather than “as owned body part” bad?
No.
The use of a prosthesis as a tool (and not a body part) already implies[ref]Conference: Hand, Brain and Technology 2018, August 26-31 2018, Monte Verita, Ticino, Switzerland. Title: Grasping and Sensing the World through Tools – Authors: Alessandro Farnè1*, Luke E. Miller2, Vincent Hayward3 – 1 Impact Lab, Lyon Neuroscience Research Centre; 2 INSERM U1028 ImpAct Team, France; 3 Sorbonne Université Pierre et Marie Curie, Paris – Abstract: Along evolution, humans have reached a high level of sophistication in the way they control their environment. One important step in this process has been the development of tools, enabling humans to go beyond the boundaries of their physical possibilities to both sense and grasp objects. The ability to use tools is one of the most remarkable skills of the human species and, although not a unique feature of the human kind, humans’ mastering of tools has reached an exquisite level of complexity. Quite paradoxically, however, we know relatively little of what makes humans such good masters of tools. Grasping through tools is a major challenge for the motor system, in that the control of the hand, otherwise typical final effector, needs to be transferred to the prehensile part of the tool. In the first part of my talk I will present findings suggesting that motor control is not merely distalised from the fingers to a grabber prongs: rather, when we use tools to grasp objects, the body of the tool is incorporated into our arm representation, as shown by both motor and tactile tasks (Cardinali et al, 2009; Martel et al, 2016). Sensing through tools challenges the somatosensory system heavily and allows for extracting a wealth of information from the sensed objects and the sensing tool itself. I will present recent findings showing that distalisation does not apply to tool sensing either. We can localize impacts on the entire surface of a hand-held rod with great accuracy, a phenomenon we termed tool-extended sensing. We also find evidence suggesting that impact-location is encoded by the rod’s vibratory response and then decoded by spiking patterns of Pacinian mechanoreceptors in the hand. Together, these findings indicate that rather than mere distal links between the hand and environment, tools are treated by the nervous system as sensorimotor extensions of the body. — References: Cardinali, L., Frassinetti, F., Brozzoli, C., Urquizar, C., Roy, A.C., Farnè, A. (2009). Tool-use induces morphological updating of the body schema. Curr Biol, 19:R478–R479. Martel, M., Cardinali, L., Roy A.C., Farnè, A. (2016) Tool-use: an open window into body representation and its plasticity. Cognitive Neuropsychology, DOI: 10.1080/02643294.2016.1167678 Miller, LE., Montroni, L., Kuhn, E., Salemme, R., Hayward, V., Farnè, A. (In press) Sensing with tools extends information processing beyond the body.[/ref] [ref]Conference: Hand, Brain and Technology 2018, August 26-31 2018, Monte Verita, Ticino, Switzerland. Title:Stretching the body: Can one tickle a tool? – Author: Frederique de Vignemont1* 1 Institut Jean Nicod, ENS, Paris, France – Abstract: We extend our body a hundred times a day by using tools, which enable us to do more and farther away, and possibly even to feel farther away. More and more findings can be taken as evidence for the embodiment of tools. However, I shall consider three possible limits to tool embodiment. First, one may ask whether one feels sensations in tools in the same way as one feels sensations in one’s body. Second, one may ask whether one feels the same types of sensations in tools, and in particular pain, itch and tickle. Third, one may ask whether one can feel a sense of ownership for tools. I shall conclude that it is beneficial for tools NOT to be fully embodied. References de Vignemont, F. (2018). Mind the body: An exploration of bodily self-awareness Oxford University Press. Short Biography Frederique de Vignemont is a senior researcher at the Jean Nicod Institute. Her work is at the crossroad of philosophy and cognitive science. Her interest includes the self, the distinction between body schema and body image, touch, bodily ownership, peripersonal space, and more recently pain. In her book that she just published, she provides a comprehensive treatment of bodily awareness and of the sense of bodily ownership, combining philosophical analysis with recent experimental results from cognitive science. She also edited a multidisciplinary volume on the body and the self (The Subject’s matter, MIT Press, 2017).[/ref]:
- that it is very useful
- that it enables and facilitates greatly
- that is is incorporated as sensori-motor extension of the body
- that it is particularly beneficial for a tool not to be embodied
So really, any normal use of a prosthetic arm that can be used (which is the key question I want to raise here) is so well integrated into any user’s body image, that one deeply wonders how anyone would want to change that. Tool use is an established thing we all do. Nothing wrong with it – or, is there?
Why the rubber hand illusion is a relevant subject for consideration despite lack of clean conceptual link to prosthetic arms
The idea to add extra-tactile feedback to already sufficient feedback in prosthetic arms seems to be somewhat absurd. But it cannot be dismissed if something is to be gained by examining the idea more closely.
The underlying question, that can be assumed to drive the research – how do we regard the integration of a prosthetic arm into the body image of an amputee in relation to sensory feedback, and, how does the body image integration idea relate to real life experiences with actual prosthetic arm technology – seems relevant nevertheless: not because we need extra trinkets on our arms, and not because neuro-psychological model or research confusion necessarily is interesting for the amputee, but because it opens a relevant general line of inquiry that I see as relevant. The rubber hand illusion as concept is interesting also on a meta level: what other things are there that we might be lead to believe are “our own”? What processes govern what we believe to be “our own”? Is “owning” good or bad or both? What does it contain really?
The body of questions that is looming concerns real prostheses and the rubber hand illusion as assumed to be valid for prosthetic arms: we might call it the Actually Stepping on My Toes Perception – as it is clearly not an illusion, if you fire actual electric signals into my already painfully bloated congested (link) poor little stump. What human do you have to be in order to wish to do that? In a world that abounds with questions and lacks answers that seems like a promising subject for yet another blog post.
Why prosthetic stock components must fall apart all the time: building and selling prosthetic arms and planned obsolescence
Financially, prosthetic technicians are incentive driven. They may well get ~30% surplus on any hardware sales. Thus, a myoelectric arm for 80 000 CHF is by far the more attractive sales than a 6 000 CHF body powered arm. Also, the activity restriction that a myoelectric arm imposes on you as user is far more striking than the restriction that a body powered arm implies by its nature: the myoelectric arm at every step of the way stops working, hurts, pains, and falls apart. It is delicate and made to appear delicate. That it falls apart already when just sitting on a sofa may be unfortunate (established previously: link), but these arms are never made to instill confidence in a user the same way a body powered arm does.
A well built body powered arm is like bathing in grip power, in grip proficiency and reliability. As minimal as a grip offered by a prosthetic hook seems, as extensive is its mental support by providing an entirely visually planable, grip wise reliable and control wise graded, analog, sensory feedback related access to activities. With that comes the path to more, more, more – and so the typical body powered arm user will be at the prosthetist all the time, for more repairs. We expand our level of loads, use, and wrecking. We go places. We really do stuff. And so the low cost mechanic is not a role a prosthetist wants to play if they instead can play the role of the high tech specialist that programs their clients. The symbolic connotation also is different. You, as researcher, wherever you are, may not want to perform mechanical design and deal with hard working sweaty smelly amputees that always have a bigger axe to swing and a heavier box to carry, you want to use sophisticated machinery and tests to appear intelligent. The only way for you to do that is to focus on the assumed clever, sophisticated and intricate intelligence of apparently advanced circuitry, getting lost in ingenious machine learning algorithms, while saving the amputee from what anyone, also you, think they see and understand so clearly: the visually apparent lack of full anthropomorphic conformance. The dynamic interplay of that approach has already been detailed previously (link).
The diagram shows how performance (blue wavy line) of the prosthesis will come to a first grinding halt in user perception when the honeymoon is over – first red dot – and then, usually, after the performance fall permanently under the rejection threshold (red horizontal line), one is fed up. A typical prosthetic arm thus has a possibly short net life time of maybe 6 months until the user is terminally fed up. We make good for it by being really nice and patient.

So given the hard fact that prosthetic arm components are built to fall apart after around six months at their latest, how to get amputees hitched past the “honeymoon over” moment?
Boundaries of rubber hand illusion to be examined more closely
To constitute a rubber hand illusion as slipped into prosthetic arm research, a prosthetic device will have to reside within at least two further boundaries than seem to be currently specified in literature:
Firstly, there appears to be a shape boundary or morphological boundary (T1 in the below diagram). That boundary will delineate the least human like shape that still is successfully integrated into a person’s body scheme. This is pure model work however: personally I never felt my stump did not belong to my own body, so a non-hand looking arm from my perspective certainly is totally owned by me. Also, I can wear any prosthetic gripper and be fine with it, and yet, these devices clearly work as tools, not as owned parts of my body image. Some studies identified a realistic looking prosthetic hand as opposed to wooden, less anatomical looking hands as a requirement for rubber hand illusion to take place [11, 12]; interestingly, this is both in line and in conflict with resolving perceptual issues with other people that my prosthetic hand will elicit, taking into account my adapted variation of the Uncanny Valley [link]. Thereby, I will have a markedly different perception of my own rubber hand than other people. Thus, wearing a prosthetic rubber hand that does look natural or such will put me (but not others) at ease. The same can be had with far more grasp capability and far less expensive troubles with a tweaked body powered prosthetic hook arm. That, in itself, also feels like an almost too familiar tool, not quite a body part but almost, whereas researchers will call this type of adoption super-natural, as it is eerie, strange, spooky, hostile, to be damned [13]. With that, we are back to superstition where we had been on square one [link]. So clearly, there are open questions.
Secondly, I will propose that the amount of sheer nuisance, the amount of aggravation, the frequency of disintegration cannot exceed a certain level before any prosthesis will be removed from any steps towards entering one’s body image, and at times, violently so (boundary T2 in below diagram). It is a clear result of empathy that a researcher also feels the (mental) pain when parts fall apart all the freaking time, and as basis of that and that alone, any adoption of a prosthesis into one’s body image, or even a modest adoption of a prosthesis as a tool, is successfully avoided and the amputee is shown their place in society with regard to consumer products as simple as an arm: way down bottom.
The following diagram in short combines a human likeness (x) and lack of nuisance (y) scale.
Whereas real components and definitely myoelectric parts, from a real work perspective, largely reside below the rejection threshold, some parts have the technical potential to be improved to work for real work (red fat arrows).
The rubber hand illusion resides in the indicated area on the diagram, but has no prosthetic arm correlate that actually works. The two thresholds for a thing to be a rubber hand are (T1) an appearance threshold and (T2) a nuisance threshold.
Any mental distance, a feeling of remoteness as such, might add to problems with body image incorporation when a rubber hand is too far away metrically [14].

Actual performance requirements as hard problem
You need to really understand just how badly built conventional prosthetic parts can be from a user view, before hoping anyone adopts these into their body image. As an amputee you risk to approach fitting a prosthesis already with the anticipated feeling of re-gaining a limb, which will be disappointed sharpy and harshly as you will see.
As technology per se does not get better, the question that follows is what happens when such badly constructed technology gets adopted into a body image and fails the way these things fail. That will be when you lose even more users.
Prosthetic arm use in real life never happens in a vacuum, but often under real work constraints, and we are, often and generally, quite healthy, as opposed to what some researchers seem to think
Much rather, prosthetic arm use is tied to specific tasks and duties which can also be spelled out as physical requirements. In my instance, job-wise, we type a massive lot of texts, we lift regular weights of 60-90 kg, sometimes up to 190 kg, we work in protective gear at ambient temperatures between -15 to 30 deg C mostly, we handle delicate equipment in absolute no-drop situations, we load, unload and clean up or refill our equipment and cargo, drive out on cases, and perform lab work of various sorts – and we do that with cost efficiency. The prosthesis must achieve grip reliability exceeding six sigma levels under given constraints and require repair, by and large, of not more than once a year. Weekly repairs of 3 hours each are entirely intolerable. The performance requirements and applied test results of a customized body powered setup versus a myoelectric “bionic” prosthesis were published before.
With that I do connotate physically demanding work as “real work” entirely in line with prior writings about the seriously and colloquially meant use of the term “real” (link).
If you are not a real programmer yourself, you may not get it. If you do not accept that amputees can be exactly as pre-opinioned and satirical as anyone else, you may have exceeded a critical boundary, and should leave immediately.
To work that hard, also you have to be reasonably healthy to work under real work constraints.
You read that right: to work that hard, also, you have to be reasonably healthy
It is thus astounding how some researchers still, in this day and age, describe users of prosthetic arms, amputees, as “not healthy”, whereas anatomically intact subjects are termed “healthy”, while none of the authors are, ever, providing contemporary medical evidence of actual health such as a normal body-mass-index, blood pressure longitudinal checks, urine or blood testing for disease markers (e.g., [15, 16]. There are exceptions, too, but studies that lack such a fundamental understanding of health from my view raise other questions. To say the least, such ill-defined adverb use marks an attitude towards amputees that, on a general level, fits into the rubber hand illusion on a metal level, on a project level, on a level, where we are down-graded just enough to then having to take these researchers subjective and personal opinions as facts. It is certainly time to level that field.
Prosthetic arm being viable as a tool, before being viable as rubber hand / step on toe illusion, to be integrated into two-way sensory feedback loop of prosthetic arm
A prosthetic arm thus has to be viable as tool, first and foremost, to exceed a minimal performance required by even the most ill-defined and most slippaged rubber hand illusion concept, by any concept whatsoever, even if dragged to the market and back a thousand times.
That, at least, is my take on it. If you can sell functional crap as body image integrated hand, good for you but uninteresting to me (as a user). To integrate mechanically pure crap into one’s body image would be a recipe for disaster because of the many individual bad exit strategies.
In fact, if one starts to believe that wearing a prosthetic hand indeed restores any kind of body image issue, then, the ubiquitous sudden death of these ill designed devices has a negative impact that is along the dimension of as having one’s face smashed, or, hand amputated. So any fall-out will not be happy. In fact, this whole blog is a fall-out of overly faulty prosthetic commercial components for prosthetic arms. If you think this is very critical, acerbic and not too happy, then I reached my communicative goal. That, dearest, will be intended.
Rubber hand illusion precluding facts to consider: what are the real and realistic use-specifications for decay cycles of current prosthetic components, or, how fast to prosthetic arms fall apart routinely and as regular user experience

The conceptual reality of my prosthetic arm use, the cycles of product use, damage, repair and improvement is illustrated in a diagram (below).
The absolute numbers that follow – further down – are a clear issue in that only these put a face to the reality of wearing a real prosthetic arm.
From real figures derived from actually wearing and using a prosthetic arm in real life as outlined above, the assumption that any such commercial stock componentry built prosthesis can ever be part of my personal tool box leave alone body image is ludicrous at best.
The cycle of product use will describe continued hassle-free use only for as long as the prosthetic arm does not break. As we shall see below, with absolute numbers, their parts fall apart so rapidly when using stock components that this is really not a given. Their damages are so prevalent that they entirely dominate the dialog about prosthetic arms. To move existing concepts or strategies (myoelectric, body powered: these are concepts or strategies) as well as concise components into a domain of flow, of continued uninterrupted use, thus constituted an absolutely major achievement for me as hard working arm amputee that I had to provide all in my spare time. It is thus asked of me, by an insufficiently organized society, that I freely offer my resources to solve problems listed as main subject of research on a large number of people that call themselves “professional”. I spent at least 6 weeks in net time, solving practically relevant if not burning problems, that no one had thanked me for, or asked for, or cared about before. Disability insurance, whom I took along on my path, were however a true companion, with very professional people that financed a number of developments we made. I am deeply grateful for their compassionate and professional support of my technically vastly superior solutions that I came up with, also with the great help of others as detailed below.

Example of work specifications: bike repair
The question was asked, to the audience, how to best replace a typical setup of bike cables.








The audience was given a choice between hook, Becker hand or iLimb.



The answer is, no prosthesis works best.
It illustrates how detailed information about the actual task if paramount to understanding what an amputee encounters permanently. In other words, if you did not immediately detail and analyze the intricate risks and benefits of a steel cable as a device that is very robust to stretch and extremely sensitive to edges, to bending over sharp ridges, then you can neither understand critical aspects of body-powered control (there, mounting steel cables correctly to avoid user drop-outs is of absolute essence), nor can you understand critical aspects of correct device choice, design, tuning, tweaking or development, and grip use, for technically responsible prosthetic terminal device use. And of course you can’t. Which is why there is this website’s tenth anniversary now.
| Without prosthesis | Body powered hook | Body powered hand | Myoelectric hand | |
|---|---|---|---|---|
| Pull force | Sling cable around arm and pull | Can be achieved | Sling around fingers,pull | Grip force not sufficient** |
| Risk of cable damage | Absent | Considerable* | Absent | Absent |
| Risk of prosthetic damage | Absent | Absent | Considerable** | Considerable** |
Components 1: Wrist
This illustrates how many frustration levels are experienced with a simple prosthetic wrist.
This illustrates how important the nuisance level is for real use of a prosthetic arm. Think about it this way: the first wrist is a goner after seconds. What does that do to you? The second wrist will die eventually, over the weeks to come. They always make a drama out of it. It feels bad, you hoped this was “your” prosthetic arm, “replacing” your arm, and you realize over and over that you are totally being set up, you are being reamed for not only time, attention, money and physical pain but for hope units, for units of restorative energy. And all these, mostly your hopes, are trampled upon, not just once or twice, but all the time. It is as if they beat these out of you with a rare joy, they intentionally lie to you, their “customer service” often seems like a joke [link]. When would you give up entirely? When is the honeymoon definitely over (see diagram above for reference) for you? Do you think the products that are advertised as “robust” are actually conformant to the CE-label [link], seeing as if they do not represent what the product descriptions or promotional materials (part of CE legislature) require? How do you feel when you experience such product failures as a consumer?
A prosthetic wrist as issued by Otto Bock (“quality for life”) can die very, very, very fast.
I was sitting at my prosthetist, waiting for the first ever prosthesis I was going to get, and when I had put it on, the man said that I could press there to change or swivel the wrist and five seconds into first use, the wrist died.
It blocked irreversibly. Five seconds, that one. Arm here, arm on stump, arm dead. Within the blink of an eye.
That was somewhat embarrassing, to put it mildly, but as I realized later, there was absolutely nothing that Otto Bock ever designed at a level of “quality for life”. It was always “items to fall apart way before you know it”, to put it bluntly.
 MovoWrist Flex 10V39
MovoWrist Flex 10V39

They then put a spring-squeeze wrist into my prosthesis. It took them an hour or so. So: I was there, the first wrist was a goner after five seconds, then I had to wait for another hour. It was a spare one they had lying around.
That wrist then later caused problems, i.e., after a few weeks and months, because the relatively soft metal spring dilated, and its diameter then did not conform to the Otto Bock bolt adapters, that, as we we found, had relatively widely spread bolt diameters, resulting in unforeseeable malfunction (link).



This shows the diameters of the bolts. The largest one jammed, others did not get fixed well in the wrist unit.
So the diameters were either too large or too small. The prosthetist had more in his drawer that also did not work then. When he had to fix this he came back from his storage, confused and bewildered. Later he said Otto Bock representatives said they would indeed have these manufactured in Far East or so, and only limited quality control in place. They still charged me 80 CHF for a single adapter bolt.

We figured that going into a debate with their “customer service” about quality and robustness would be entirely uninteresting,. because they would be, both as humans and technicians, unable to relate, unable to understand, and, unable provide better devices. To this day they have no better devices so the last ten years proved me right. “I told you so”, see below. I had asked them for an apology, several times, which they never gave to me. This clearly shows intent to sell me overpriced non-fitting produce.
So we went ahead to design, build, test and improve our own wrist adapter, which now works for at least 4 years un-serviced and that I can swap at home myself within a short amount of time. While the wrist costs, with a cold re-start of CNC-machine programming, 5000 CHF with adapter parts, it is still cheaper than the Otto Bock wrist, which I would have needed to get replaced every three months, running up costs to almost senseless proportions. Hence, disability insurance covered my self built wrist unit, twice now. We applied for that, they tested our claim, and they agreed.

First prototype:

A first heli-cline mechanism was great and particularly robust to dirt. But it had its drawbacks.


Second prototype was the ball-lock wrist I wear now. Firstly we used a jagged or saw-tooth lock. For the final model, this was modified.

 \
\The function of it is rather simple.
This is the wrist in its locked stage. It is very sturdy, you could pull a car with it.
By pressing the cover towards the arm, the adapter is unlocked and it is possible to turn the terminal device. While the cable is pulling, the wrist is pulled into a non-rotate position, so it is possible to leave it unlocked for fast repositioning.

This is a drawing from the patent.

Table with the relative improvements in relation to the wrist connector: this shows that by swimming entirely against the stream, against everything the commercial and academic stake holders provided, I managed to get my own, very stable, robust and useful wrist unit financed and built. The numerical quality dimensions are absolutely massive. If anyone improves your car speed, money in your account, academic paper citations, by any factor between 3,8, 30 or 1800 (see below table) you will be in absolute disbelief or overjoyed, besides yourself, and not believe it. It is an extreme increase in life quality, rest assured, one you have no avenue to relate to at all. It is within the realm of adopting a prosthetic arm, however, that these initial problems were unbearable, and their technical issues were solved.
| Commercial parts | Own development | Improved by factor (wrist) | Impact per 5 years (wrist) | |
|---|---|---|---|---|
| Wrist survival | 2 months, | 4 years if not more, then service | Factor: ~30 | Severe |
| 1 m decay | 0 critical events /5y | |||
| 20 critical events/5y | ||||
| Wrist replacement delay | 5-6 weeks | .5 h (can be replaced by user immediately) | Factor: ~1800 | Massive |
| Wrist cost | 700 CHF per wrist | 1500 CHF production price, 5000 CHF cold production | Factor: 3.8 | Saved over 9 years: |
| 25 200 CHF per 9 years | So far: 6500 CHF per 9 years | ~ 18 700 CHF | ||
| Saved per 5 years: | ||||
| ~ 11 000 CHF | ||||
This shows that the rejection threshold is only exceeded by performance parts with very significant own investment and work. Under real work constraints, we sure made our wrist function and prevail.
Components 2: Control components (cable, myoelectric)
This illustrates how many frustration levels are experienced with further components of the prosthesis.
This expands the above made explanations about how important the nuisance level is for real use of a prosthetic arm. A rubber hand illusion is hard to install if stuff falls apart all the freaking time. Literally.
The cable tears were one of the most nerve wracking problems.
Cable breaks were sudden, once every 4-10 days, then waiting for yet another appointment for getting it fixed, over two years.
Each appointment about 3 hours total time. If you think function, think again. Think permanent malfunction and what it does to you. There is an emotional aspect that runs deep. Not only is the make and build bad. The “customer service” experience cannot help you. The technicians have no idea. You get the arm fixed alright, but they put the same ill-designed parts back on that were the problem just four to ten days before. When a cable tears, chances are high you get sharp force skin injury from the torn steel cable. There is sharp pain, abraded and sometimes bleeding skin. No user information ever tells you that [link]. You think you have seen bad customer experience? You have seen nothing yet. If you do not get livid mad with such components, you must have a heart of stone.
This can be a device used as a tool, potentially, once the teething troubles are eased over so to say – but inside the body image? Inside yours, who knows, but I tried and it did not make it to body image. If you feel yourself into this path of true pain, I am not sure it ever will land in your body image either.

A prosthetic cable as issued by Otto Bock (“quality for life”) is shown in the following image.
It is made of perlon and in my instance, the whole cable control was so weak it irreversibly tore up within 10 minutes. The cause there was both the weaklish cable setup and the Otto Bock two-way hand that jammed irreversibly because of what I later was told was another instance of faulty design.
It was 2008, and it was faulty design given the exposure and loadings the cable was about to face: all manufacturer defined. After ten minutes wearing what I had figured was the most beautiful prosthetic hand in the world, after being in heaven, relatively, for ten minutes, all illusions were shattered.
They told me I could get an appointment for repair two weeks later.

The Otto Bock parts that I obtained after two weeks, at the prosthetist, were typical cable housings that unilaterally wore down the steel cables, and strange connectors that would succumb to fatigue fracture of the cable.
The standard Otto Bock parts would result in cable breaks after 4-10 days, mostly after around a week or so, and subsequent repair was possible within 1-2 weeks.
That also means that I worked without prosthesis on, for 1-2 weeks, every other week, because the prosthesis was broken all the time, really. It showed me, side by side, what the advantages of a prosthetic arm really are, and, what dynamic occurs if one really uses it, and how it is when it breaks all the time, how permanently spending a lot of time with repairing truly faulty design changes one’s view.
Overall, this caused me over 40 appointments of about three hours including travel, for two years, with my prosthetist, who diligently installed the same faulty engineering back on my prosthetic arm.

While that was a problem, clearly, I realized that I was on my own (again later with the wrists, etc.) and fixed the control by using a hardware store steel cable. So, as arm amputee, no researcher or developer had anything to sell to me that would solve my problems.
Here are some pictures of first attempts to better mount steel cables.


I decided to build my own full cable housing setup.

I got myself professional advice.


I invested substantial time and efforts to find a better solution.
After all, bowden cables are used elsewhere with far less wreckage. So prosthetic arm industries were systematically failing users for decades. They still are as far as I know.
After consulting with Brugg Drahtseil AG and with Ruedi Hafner of Hafners Rad in Wallisellen, I felt sufficiently informed and sat down with a piece of paper to conceptually solve the prosthetic arm cable problem in a general rather than an overly restricted or material-/product-dependent way.
This resulted in an innovation (patented, link) whereas the cable now can be worn under full loading for at least around 9 months, and I can also repair it myself.



There are still some parts to be improved but I now get 9-12 months performance use out of 1 cable setup when and if mounted correctly.

These issues now are also under control. I currently wear 3D printed parts for the first time, as these seem to provide better mount points than manually drilled PVC parts. Also I started to crimp my steel cable into place recently, after wearing screw fastened clamps. At any rate, I massively improved performance here with increasing focus on relevant details.
Relative improvements of our cable control characteristics in the below table show a massive improvement. If your money in your bank account is multiplied by any of these figures, such as “cable survival: factor SIXTY”, then you will somewhat relate to how I feel about my extended cable life. It is not just like day and night. The positive experience is far out and beyond that. If you have 100 000 CHF in your account and all of a sudden it is 6 million that will be an equivalent. Not only are cable repairs now necessary only a lot less frequently, I can also do them by myself, and that then will still be faster. You cannot tell that as inspirational story as it is too bold, figure wise, too successful, technically. You will have to do something else, leave the Bowden cable issues behind. They have been marked off by the unlikeliest contender here, by myself. But if ever you do manage to put yourself in my shoes: not only does it really work, also I was the one to come up with it.
| Commercial parts | Own development | Improved by factor (cable) | Impact per 5 years (cable) | |
|---|---|---|---|---|
| Cable survival | 4-10 days | 9-12 months | Factor: ~60 | |
| 120 critical events/5y | 7 critical events /5y | |||
| Cable repair delay | 1-2 weeks | 0-1 days | Factor: ~12 | Prosthetic arm availability increased from snips of ~80 h to (far less interrupted) ~ 14600 h |
| Cable repair duration | 3 hours | 1-2 hours | Factor: ~2 | |
| Total cable repair times per 5 years | 360 h | 14 h | Factor: 25 | Repair time effort reduced by factor 25 |
Myoelectric control and grippers are different, even more unreliable
The promise of a myoelectric prosthesis is immense.
On a user level, it is everyone that makes really big eyes. It is loaded with even more expectation than a body-powered arm. That heavy loading with promises is problematic from an etiquette or label view, as matching description and actual performance are a CE-marking requirement [label]. If these devices had a true-to-experience content of descriptive and promotional materials, a lot of subsequent disappointment would be avoided. But as is, you find out by yourself, as a user, and then see if the manufacturers can deal with making public what would have belonged into the product sheet to begin with.
There are serious control issues that contain body position effect (this can always happen and it is not possible to reliably overcome it with multi electrode control such as offered by CoApt), erratic malfunction (skin dryness, ill alignment), and then there is sweat. A technical and comprehensive account is given here [link]. Sweat may both involuntarily activate or stop the function of a myoelectric device. In addition, mild sweat may negotiate the occurrence of electrode burns, which are insidious skin lesions that may take up to six weeks to heal. Grip wise, one of the only real reasons to wear a myoelectric arm is the possibility to wear a “bionic” hand. These, however, contain an ill fashioned grip geometry that causes serious problems both in grip planning and execution. Last but not the least, gripper surfaces for “bionic” hands are usually so fragile that wearing and using and obviously damaging them is an extremely cost-inefficient experience.
Overall, myoelectric control in research has not improved control rates in four decades [link]. The technical aspects of this type of control cause the real life approximated tests to yield control error rates in the range of 11-35%, which is massive. Laboratory tests still show a slight increase (!) of academically published error rates over almost 40 years. Most importantly, published error rates are insufficient for real life and real work use even when considering best laboratory given results (see link for details).
The iLimb has a grip geometry that results in frequent grip misalignment.

Limb position negatively affects myoelectric control.
This also happens with a multi-electrode COAPT system.

But it also happens with just two electrodes.

Sometimes the thing does not work at all. While that occurs to me quite often, it seems to also be an experience of a Cybathlon 2016 contestant that happens to be a professional iLimb user. Nevertheless, even these normal malfunction aspects are not declared anywhere in the promotional or documentation materials of the device [link].
If I have to use my mouth anyway, I mean, why bother with iLimb?

(C) Copyright Swiss TV SF DRS
Problems of intractable myoelectric control issues:
| Commercial parts | Own development | Improved by factor (cable) | Impact per 5 years (cable) | |
|---|---|---|---|---|
| Limb positioning effect | YOU ARE ALWAYS DOOMED | YIKES | You get sick of this real fast | |
| iLimb gripper misalignment and grip failure | YOU ARE ALWAYS DOOMED | YIKES | You get sick of this real fast | |
| Sweat interference | ~15 minutes | YIKES | You get sick of this real fast |
As is emerged, myoelectric problems are serious from a user perspective to a degree that they may thoroughly mess up our days [see Bad Hand day posts]. I am not the only one to see things that way. We had a myoelectric dialog on a web-support forum regarding such issues [link]. If you think that myoelectric technology is not a Dead Horse, I have a pretty good idea whose true experiences as well as their serious issues are entirely irrelevant to you. Ours.
Components 3: Grip mechanics
This, again, illustrates how frustration levels are experienced with grip control. This expands the above made explanations about how important the nuisance level is for real use of a prosthetic arm. Imagine yourself in these situations (below, images).
Grip force
Grips are too weak, really, so often they just are. An iLimb is no help in many situations [link].

(C) Copyright Swiss TV SF DRS
Grip geometry

(C) Copyright Swiss TV SF DRS

(C) Copyright Swiss TV SF DRS



Grip enhancement with grip covers
Gloves break all the time. They are very expensive. The iLimb is weak, motor wise, so gloves have to be very thin in order to not impede the hand motion.

This one tore up in the cupboard, when left alone.

Grip enhancement with grip covers in body-powered devices (check other reality)
This shows how soft grip covers improve grip performance on a TRS Prehensor, one of the best grippers around.
 T
TA light-weight derivative of that device won the 2016 Cybathlon arm race.

This shows some good grip performance.



This shows how I can build custom silicone grip enhancers for the Toughware Equilux.



This is a way to tweak the TRS Prehensor to better grip performance: adding soft rubber layers.



The TRS Prehensor has great grip geometry in that it is reliably predictable and stiff.


Components 4: Shoulder harness
This, again, illustrates how any frustration levels are experienced with further components of the prosthesis.
Imagine that you just about solved the wrist (above), cable control (above) and grippers aspect – and then your other arm starts falling asleep all the tie because now, Otto Bock figure-9 harness does something truly weird: a conventional figure-9 harness for body powered control will sooner or later damage your nerves. That is disabling and painful. This expands the above made explanations about how important the nuisance level is for real use of a prosthetic arm. They never explained that to me, or, made me aware of that as an issue, or, got my informed consent for that; that is that as long as figure-9 harnesses are proposed to be CE-conformant, we want to check the actual versus hoped-for conformance [link]. Or reversely put: had they stated upfront, in the harness documentation and on their website, that a clear to-be-expected medical side effect from wearing a figure-9 harness for real work may, can and will eventually cause brachial plexus damage, that would have helped us tremendously. In fact, practically all of this website’s content, struggling with devices that are unfit for real work, despite being advertised as such, could have been avoided by a far stricter conformance to CE-marking laws [link]. Then, side-effects of extensive use under given work constraints would have become clear from a factual product documentation and promotional materials.
After all other things that do not work one bit, see above, you should feel very exhausted. Now, this is another, and very serious setback that threatens your health. Feel sufficiently disappointed yet to abandon wearing a prosthesis now? That was when I also seriously intensified my advances into myoelectric technology.
But, never mind. The people that build commercial prosthetic wrists and cable mounts are likely the same people that make figure-9 harnesses. We have to realize that the user is the end-all-be-all inasmuch as actual improvements are concerned.

So it was an Otto Bock figure-9 harness (21A36=1) that had caused me serious brachial plexus compression over time.
I had to permanently stop using it in order to prevent a double crush injury from causing lasting neurological issues on my left (“intact”) arm.

We thus developed a shoulder anchor that bypasses the plexus and does not compress it. This allows me to always wear my prosthesis and not worry about neurological issues of compression.

Table showing relative improvement of standard figure-9 harness issues by our own development:
| Commercial figure 9 harness | Balgrist shoulder anchor | Improved by factor (cable) | Impact per 5 years | |
|---|---|---|---|---|
| Time until brachial plexus problems | ~1-2y | indefinite | Massive | Massive |
| Recovery time | ~3 months | No recovery time necessary | Massive | Massive |
If you cannot comprehend just how devastating a brachial plexus injury due to a figure-9 harness when depending on a body powered arm for work really is, then you must be in a really dark corner. If you cannot comprehend just how great then, the resolution by a clearly well engineered shoulder anchor is, as these both relate in terms of understanding, then you may have to just write it down and learn it by heart somehow. However, this web page is only about making it through a right below elbow amputation, not about making it through a lack of comprehending serious health complications from wearing body powered prosthetic commercial arm parts after being told all details.
Last but not the least, you may want to try to even just remotely understand what, in terms of integrating a prosthetic arm as tool (leave alone “owned” body-part), it does to you, to have your prosthetic arm attack the nerves of your other arm to the effect of a double-crush injury. I guess you would need a degree in neurology, neuropsychology, medicine, or such, to understand any implications of such. But one can never be sure.
Components 5: Stump skin and suspension
The stump really suffers from wearing a prosthesis.
This, again, illustrates how any frustration levels are experienced with further components of the prosthesis. This expands the above made explanations about how important the nuisance level is for real use of a prosthetic arm.
A hoped-for or intended, aspired or targeted rubber hand illusion is impossible to install if stuff falls apart all the freaking time, and, if it damages your stump beyond normal pain or suffering levels.
And while the total problem list is exhaustive, stump skin problems are added on top, they are daily, they are very pressing, urgent, always happening.
They add a different level of irritation to the overall experience of wearing a prosthesis. After a while, when embodying these problems on a daily, weekly, monthly and annual basis, with extreme own efforts to remedy these, you do wonder where research really is. It is 2018. And. The. Best. Thing. To. Wear. For. Real. Work. Is. Still. A. Body. Powered. Hook. You let that sink in?
Typing 1 day – blisters
These are blisters and abrasions after 1 day (One. Frigging. Day.) of typing with a myoelectric arm. Took about a good week to heal. Very painful. Cannot be recommended if you are after comfort, but if you try to understand aspects that are vitally standing between a good rubber hand with multi-sensory feedback (“multi” probably meaning that it still hurts more, despite all that pain-exacerbating pain-numbing ooze and blistering), yourself, in your capacity as a person that so far has not understood but now tries to understand, I can only recommend a good abrasion and blisters on your forearm to convey a real feel of a prosthesis to you. Then you are in a better position to find out what may be wrong with adapting a real prosthetic myoelectric arm as “owned body part”. Also it takes a while to heal, all the while you won’t be wearing your now-“owned body part”. There is a lot that goes into it, I know.
Riding bike a few hours – electrode burn
Electrode burns from myoelectric arm, took about 6 weeks to heal. My prosthetist said that other clients had that too but best to not tell anyone. So, I will only write about it. Haven’t really told it to anyone. Not sure this is what CE tried to cover [link].


Friction rash after 1-2 days – pain and itch
Friction rash, itches and burns, takes 1-3 days to heal. This is the most frequent rash. It is more painful and irritating than it looks, really. I know it looks somewhat irritating and painful, but it is even more like that in real life. Is not mentioned in Ossur liner documentation or product information [link].


Congestion eczema – takes weeks to heal
Congestion eczema from Ossur liner. Took a long time to heal. Hurts and itches. Ossur “customer service” did not even answer my mail. They never inform their customers about that as side effect [link].


Preventing friction rash with tube gauze
Fixing friction rash with tube gauze (as that is the way it is done, it is not explained in any liner documentation). . Fixing congestion eczema with better liner, this one is heat deformable and a hell of a lot better than the Ossur material.

Arm after full work days wearing combo gauze and liner for body powered arm.

Table to show relative performance of previously used stock components against our modified choice and combination of parts:
| Average choice | Ohio Willowwood / Tubular Gauze combo body powered arm | Improved by factor (cable) | Impact per 5 years | |
|---|---|---|---|---|
| Standard Ossur Iceross friction rash | 1h- 2d | 10d | 5-80 x | Severe |
| Standard arm friction rash | 1d light work | 10d heavy work | 10 x | Severe |
| Congestion eczema | This means to stop using a prosthesis. | I can now continue to wear a prosthesis. | (n.n.) | Massive |
So again, try to imagine what it does to your body image if you even enhance the adoption of a prosthetic arm into a body image when in fact, that arm damages the stump skin so fast it makes your head spin. You will be in and out of wearing that prosthesis all the time, normally. It is what we hate these devices for. There is no love in getting one’s stump all covered with a rash that is more painful and irritating than it looks (above).
You still seriously consider going ahead to implement these devices “more” into our brains by use of neurological or neuropsychological trickery? The backlash that disillusioned amputees generate is already significant as it is without extra efforts to distort our body-space continuum.
Components 6: Overall component revision and replacement effort and time and cost saved
Overall, my invested net time of around 6,1 work weeks over two years were matched with saving cost and time of around 27 000 CHF. Just by how much that was (and is) not a given, is detailed above. We made a miracle work. Being focused paid off. I now have a body powered arm that I can wear and that works. That is substantial as such, from an efficiency and cost-effectiveness standpoint of maintenance and use alone. I certainly also owe it to the support of a number of people. It is the single most astounding aspect that sets me off as perceived super-user [link], against a bunch of other users whose arms die so much earlier. Really? Just build your clients truly useful prostheses and see where they take these.
The group of people really working on performance parts, generally, has their heroes, too. I guess Burt Munro is one of my real heroes [link].


Ownership and flow
Flow, a possible requirement for experiencing a good prosthesis as a really useful tool, has its own science. Before any rubber hand illusion in some adaptive sense is used for prosthetic arms, I suggest to give the concept of flow a closer look. Try to make good tools before tinkering with a path to hell seems to be worthwhile to at least read about, or don’t you think?

As a user of a prosthetic arm, you want to be able to concentrate and focus (which is not possible when the prosthesis acts up and falls apart all the time, read above). You want to be able to explore and be playful inside the application or focus domain, not permanently trouble shoot a permanently faulty prosthesis and put up with extra pain and restrictions.
What a disrupted flow does to you can easily be experienced. The above list of experience details is relevant to this.
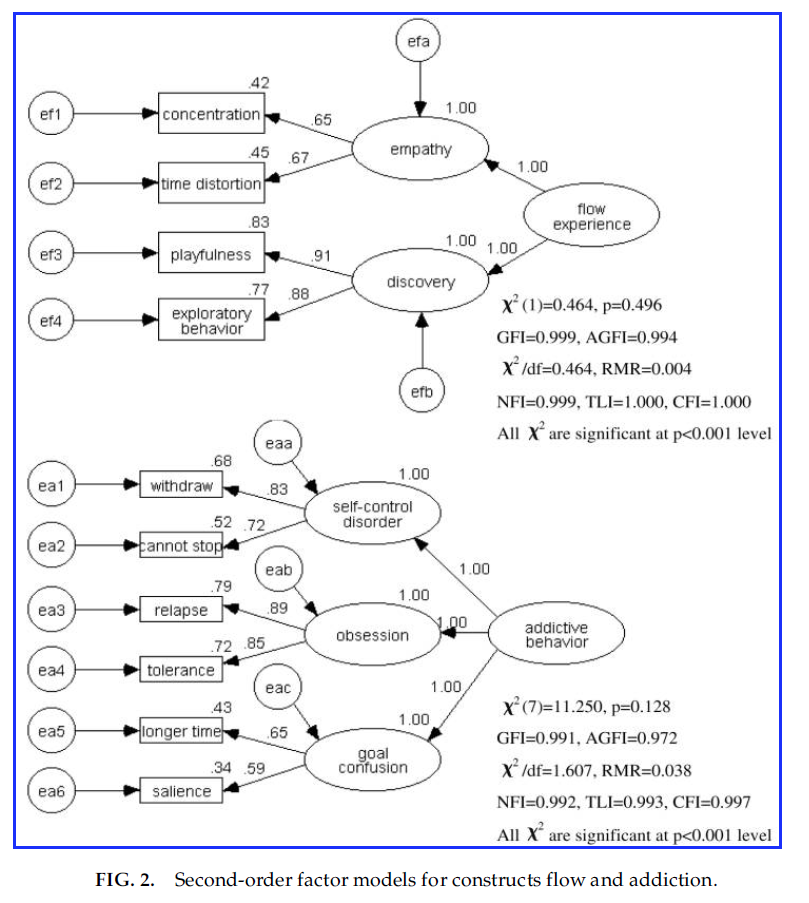
The skill of a prosthetic arm needs to be sufficient to allow “flow”. If its skill are not sufficient, the user has worry, apathy, anxiety, maybe arousal or boredom. So the skill, technical advantage, can be modest but it has to definitely be there and at a sturdy, fluently reliable level.

This guy figured it out.

The fluency use concept at work. You cannot say I had any trouble integrating the tool use of a prosthetic hook into my body image. That stuff works as if it was really well greased.

My own actual body integration of tool or rubber hand illusion in relation to concise use experiences
Myoelectric “bionic” iLimb
- There is substantial nausea, because the hand is very eerie. Its visual appearance commands a visual proximity to a human hand and that makes it entirely uneasy. The Uncanny Valley effect works extremely well. It is spooky, ugly, weird and extremely alien. Also the whole arm conveys a grave feel of lack of control and lack of reliable manipulation.
- The control feels as remote as an artillery exercise: you trigger a command and some 20 minutes later, you hear the echo of an explosion from three valleys away. It feels entirely remote.
- The grip is out of line entirely. The rounded tips approaching define angles and planes that are impossible to predict.
- After 2-3 hours, the constant lack of reliability causes a degree of true exhaustion. Automatic reliance of intact arm and center of gravity issues cause serious shoulder / neck pain rapidly.
- After ten hours of normal bit of typing, a bad rash on my stump occurred. Blisters, too.
- Despite that it is not THAT bad to wear it as such. In a way you want to love this ill-designed, relatively ugly, insanely expensive thing. It just does not really do anything.
Body powered arm (including own improvements)
- There is extremely close, graded and precise control of a rigid gripper (hook), and tension-related feedback along any step of moving the arm in free space due to cable-constrained fit.
- The control feels extremely close.
- It works in absolute real time.
- Time-wise coordination with fast bi-manual action is absolutely seamless.
- The grip is as good as it can be built for about 1-2 years of constant use with steel / nitrile combo fingers.
- I feel like I can wear this forever.
- Its limited and reduced sensory feedback scales extremely nicely into sensory and pain space.
- If it dies for any reason, no worries. I can discard it at the snap of a finger (“two fingers”?). I am almost just as good or fast without prosthesis on.
- It is ugly AF and it was not that beautiful or lovable anyway.
The beauty and risk of adopting an item or an idea into the own, tyrannically governed space of one’s own body
A medical aspect of all this is that as a developer, you will one day have to very clearly state risks and side effects, cross over problems with all kinds of issues or diseases, as well as limitations, features and target audiences. You will want to do so responsibly if ever you want to sell your stuff with, say, FDA approval or a CE label [link].
Rubber Hand Illusion 1: rubber hand illusion of a prosthetic arm in a direct sense, (not strict), as experienced by user
The adoption of a prosthesis as a tool has clear advantages over using it as an “owned” portion of a body image. The prostheses are so faulty, that if anything is prevalent or ubiquitous, it is failure and decay. So your model of adoption must have great strategies for that. The rubber hand illusion has no great strategy to incorporate disappointment as very productive response. So, abandoning the “adoption” is the way to go. Keep prostheses at a safe distance, treat and fix, trouble shoot and swap them as a tool, and you will be fine.
If I damage the prosthetic arm, and it is my owned own adopted body part, I will feel very upset. The rest of the world sees this not. They do not care. They think I am crazy. So I should at the same time adopt the prosthetic arm into my body image (when it works) and not adopt it (when it does not work). That in itself is schizophrenic. It is a considerable tension field of psychiatric proportions that you ask amputees to cover for you.
| Aspect | Tool | Rubber hand |
|---|---|---|
| Separate from body | Integrated into body scheme | |
| Requirement | Must work according to technical specifications | Must conform to my own conception of my own body |
| If it breaks | Fully utilitarian perspective | Not fully utilitarian perspective |
| If it breaks | I can switch the tool, I can stop using it, I can manage how I proceed creatively | I am harmed, I am hurt, I am in need of instant diagnosis and care |
| If it breaks | I may be disappointed, I may feel need for replacement or so | I may feel hurt, I may feel disenfranchised, I may feel injured, I may feel incomplete as a human |
| If it breaks | It (“it”) is affected | I (“I”) am affected |
| If it breaks | Others will think “so what” | Others will think “so what” |
| If it breaks | Great: Replacement at next convenience | Required: Medical level of urgent attention is required |
| Usual solution: Have 1-2 spare tools | Usual solutions: none; too expensive to have spares | |
| Reality: Who cares | Reality: Who cares |
Rubber Hand Illusion 2: rubber hand illusion as a project or work related illusion as experienced by project leader in research and development
If you adopt ideas, your work as prosthetist or your research project into your own self image, then you perform a rubber hand illusion as magic trick on a meta level. When I stroke your project, you feel stroked yourself. When I squeeze or hammer your idea, you, yourself, feel squeezed or hammered. All the while, the object of focus – project, prosthetic arm that you built, research idea – are de facto disjunct with your body and self. They are not connected. So the rubber hand concept of neurology really applies here! Not as above, where a prosthetic hand has a two-way sensory feedback and is not disjunct, physically, with my body.
As in the case of the real prosthetic hand (above), a meta level ownership or adoption can be just as problematic. Being neutral and critical towards own work with prosthetic arms, projects, research or developments is the only way to be fast and quick in improving.
| Aspect | Technical solution for amputee | Rubber hand project |
|---|---|---|
| Separate from your “own” project | Integrated into academic ownership scheme | |
| Requirement | Must provide answers, concepts or solutions according to technical specifications | Must conform to your personal conception of what you want to play with, research, produce and advertise |
| If it fails | Take it apart, look for faults, troubleshoot, improve, develop | Not fully utilitarian perspective – ride the Dead Horse? |
| If it breaks | I can revise all conceptual basis as tools are switched or swapped | There is always someone else that is guilty (golf course dichotomy) |
| If it breaks | I may be disappointed, I may feel the need for revising the approach or idea or design | I feel deeply narcissistically offended as “my” project tanks |
| If it breaks | It (“it”) is affected | I (“I”) am affected |
| If it breaks | Others will think “so what” | Others will think “so what” |
| If it breaks | Great: find a new paradigm | Required: Write a new paper about something |
| Usual solution: stepwise trouble shooting | Usual solutions: none; you cannot “solve” any of this | |
| Reality: Who cares | Reality: not even the army would buy this |
Rubber Hand Illusion 3: rubber hand illusion as a work related illusion as experienced by people that build prosthetic arms for amputees
One of the most tricky parts is making prosthetic arms for others. These “are” body parts in your perception maybe. Then you succumb to the perception of these as even your own rubber hand. You feel hurt when I damage it. But I damage it because it is a tool to me, and you built it so it had to fail.
This shows just how problematic the rubber hand illusion is on that level.
| Aspect | Technical solution for amputee | Rubber hand project |
|---|---|---|
| Separate from illusionism | Integrated into own perception of being great illusionist | |
| Requirement | My prosthetic solutions work only if my assumptions and basis for conclusions are correct. They may not be. | Must conform to my personal conception of what I want to build and “sell” to the amputee if not using volume stature and stubbornness. |
| If it fails | I will revise my underlying assumption where necessary. | It cannot fail unless the amputee does something idiotic. They usually do something idiotic [link]. |
| If it breaks | I will fix the part as a tool. | I feel SO hurt. All these hours in the workshop? |
| If it breaks | I may be curious as to the cause and find a better solution. | I may feel so very deeply offended by the amputee idiot [link]. Can’t the prosthesis be appreciated for once? |
| If it breaks | It (“it”) is affected | I (“I”) am affected very deeply. |
| If it breaks | Others will think “so what” | Others will think “so what” |
| If it breaks | Great: Replacement at next convenience | We let the idiots [link] wait on purpose. Those that treat us like dirt which they also do on purpose obviously. |
| Usual solution: Have 1-2 spare tools | ||
| Reality: Who cares |
Tool versus Rubber Hand Illusion – general comparison
Rubber hand illusion and feel good robotics are far closer to hard rejection and really-feel-bad robotics than one imagines.
The main reason for that is that body space, own body image, is an entirely impulsively and tyrannically governed body with little rational thought and consideration, cold blooded controls or analytic censorship. And if your body space were purely rational, analytic and cold blooded, a part-wise assembly, there would probably be something deeply wrong with you. So when you adopt a prosthesis as your own body part and it repeatedly dies, that is a lot more stressful than having a door that squeaks. And I am not saying squeaky doors are easy to tolerate.
In other words, a body-image integrated arm that falls apart will be mourned by the owner, and in fact, only by the owner. After all, the felt or experienced body ownership has always just been an illusion! So somewhat dryly and rightfully, everyone else will think that owner is probably crazy and even more so when the device breaks and the owner cries, falls apart mentally, suffers tremendously rather than being all cool and accepting that this particular device is a particularly badly built part that does not even remotely live up to actual expectations of a tool. To provoke such situations: that is, what you also do to an amputee by imposing body ownership onto him. You impose an intractable dilemma unto the amputee without offering a true hand out of the already existing and now new even bigger mess. Christian Kandlbauer, who was one of the first people to receive targeted reinnervation, and who told media in May 2010, that the prosthesis felt like his own body part [link][ref]”Robot arm controlled by the mind – By Helen Briggs Health reporter, BBC News Every morning Christian Kandlbauer wakes up, dresses himself, and gets in his car to drive to work. This may sound mundane, but for the 21-year-old Austrian these are remarkable feats. Doctors say he is the first person in the world to drive a car using a mind-controlled robotic limb. Four years ago Christian lost both his arms after being electrocuted by 20,000 volts. Now he is able to control all of the joints in his left prosthetic arm by merely thinking about what he wants his arm to do. He has a conventional prosthetic fitted on his right side. Experts at the medical technology company, Otto Bock Healthcare, which developed the mind-controlled arm, say it is the first project of its kind in Europe. On Wednesday, they will announce at an international conference in Leipzig, Germany, that the technology is ready to leave the laboratory and be put to everyday use. It is like my earlier arm – I feel that my arm is a part of my body Christian Kandlbauer “UK patients could benefit in the next few months,” says Dr Hubert Egger, head of the research and development project for the mind-controlled arm. “Christian is the first patient in Europe where this surgery was done, and the first person in Europe with this mind-controlled prosthetic. In the future we hope to fit patients in the UK with prosthetics like this.” Dr Egger’s team is publishing detailed surgical and technical guidelines for the mind controlled arm. It involves a new technique known as targeted muscle reinnervation (TMR), where nerves that once controlled a lost limb are used to control a prosthesis. Sensory hand A ‘sensory hand’ may follow Christian was the “guinea pig” for the four-year research project. Surgeons at Vienna General Hospital transplanted the nerves that previously controlled his healthy limb to the chest muscles in a six-hour operation. The transplanted nerves allow electrical impulses from the brain to reach the muscles in the chest. The muscles act like a booster, amplifying the signal to a level that can be picked up by electrodes on the surface of the chest. These signals are interpreted by a micro-computer, and used to control a prosthesis which responds in real time to thoughts from his brain. This allows him to control his prosthetic arm as if it were his real arm. Now Christian can drive, hold down a job, and even grasp a glass of beer. “I feel very happy,” he told the BBC in a telephone interview. “It is like my earlier arm – I feel that my arm is a part of my body.” Lighter, stronger Scientific improvements are bringing prosthetics ever closer to the real thing. They are now lighter, stronger, and more cosmetically appealing. But not all amputees may be able to afford advanced prosthetics. There is already a large discrepancy between what is available on the NHS and the expensive prosthetics provided to soldiers. — How it works: When phantom limb is ‘moved’ electrical impulses from the brain move along grafted arm nerves into chest wall Muscles boost electrical sensors and they are picked up by electrodes on surface of skin Signals analysed and converted into a pattern that can be used to control the prosthetic using artificial intelligence .– Ernie Stables of the British Limbless Ex-Service Men’s Association (Blesma) says anything that is likely to improve the quality of life for amputees is welcome. But he says expense will be a factor. “Limb centres across the country are pretty poorly funded as it is,” he explains. “And I expect this initiative will be prohibitively expensive in NHS circles. “So yes, it is a significant advance, and UK patients could potentially benefit if the funding is there. “The private option is an avenue but only very few people can afford to go down that route.” Otto Bock says it is difficult to put a cost on the procedure. The research project behind Christian’s prosthetic cost several million euros. It says the cost will come down when the prosthetic goes into production. Four years on, Christian has returned to work as a warehouse clerk at the garage that once employed him as a mechanic. He has little memory of his accident and the days that followed. He says it was strange when the limb was first fitted as he couldn’t imagine that it would work. Now, he is simply grateful that he has the freedom to get on with his life. “With the prosthesis I am able to do things in my daily life alone without the help of another person,” he says. “I am independent.” “[/ref], killed himself in October 2010.
Once you force me to accept a prosthetic arm into my body image and at the same time immediately unplug it as a tool, as a cybernetic add-on without sentimental value, I become both attached to and detached from my body at the very same time. And then, interestingly, you force me into an extremely tense field of emotions that risk to tear me apart. Or, you risk that I will start to analyze you just to see what is going on with you, as a person, that demands that I, at the same time, love and cherish and integrated and embody, fulfill and dance with the prosthetic arm through my life as if it was my own arm – but once it gets damaged, I switch all that off within split seconds, to go all cold cyborg on the situation. It is not so much a double bind as it is a very contradictory situation dependent requirement. And while that feels to be best solved by a full dissociation, by separating mind from body with relation to the prosthetic arm, or joining them back again when convenient, that also feels like it is asked of me to embody a type of processing known from PTSD (post-traumatic stress disorder) going to the direction of allowing a full-scale hallucination and then being able to bring that to a full halt.
Prosthetic arms as built and sold in real life are technical crap to the max. They disintegrate faster than you can spell KAFFEESURROGATEXTRAKT. This is only a subtle exaggeration. Prices are in the far ridiculous range while quality is in the low ridiculous range. Concept (myoelectric) and build (myoelectric and body powered) are hard obstacles, not just “problems”.
Unless you successfully SEPARATE yourself within your own self, once you start to move these devices closer to your own body image, adopt them as yourself, suffering increases drastically. Reason being that these devices do not get better by just adopting them. They are the material correlate that efficiently opposes any notion of “flow” extremely well. Their role has always been to generate revenue, not, to last or survive. They are designed for obsolescence. The community knows and we know this is not taken well by any of the players. You will rarely get honest feedback. Lack of feedback but visual strokes make the case for a meta level rubber hand effect for projects and professions overly invested in opinion driven work.
If, as non-disabled person, you demand of me that at the very same time, I wholeheartedly embrace and impulsively include rubber hands into my body scheme, while at the same time treating its daily demise and death, its omnipresent decay, as a totally relaxed aspect of normal Cyborg life just because you have not provided infrastructure and finances for 24/7 support, you (not me)might just fail the #voightkampff test.
The Holy Grail of prosthetic arm research as missing link on all levels
If anything is really missing, it is a really good mechanical prosthetic hand. One that really works well, also as body powered prosthesis.


Research priorities historically, permanently, lack basis for tangible results that do change a real user perspective
Prosthetic industries and academia have clearly achieved one goal over the last 100, 50 and 20 years: it is the year 2018, and for physically demanding work both in forensic medicine and farming as well as other such domains, a prosthetic hook that is body powered and mainly supported by user driven innovation is the best that can be worn (link), and it is the one device that wins over all “bionic” myoelectric attempts (link).
This, in a nutshell, also shows how insufficient, useless, confused, and screwed up prosthetic device research and development has been so far. It does not help to treat us as incompetent [link] or to advertise and document products differently from what they turn out to really be [link].
Again, I am not interested in prosthetic arms because I find the field fascinating. It is a complex field, but I do not find it fascinating.
Much rather, it is a stalemate played out by a clearly constant power structure, resulting in user voices not heard, resulting in research happening on an entirely different planet that is disjunct from planet real life.
They cannot get attitudes right (link), they cannot get grip pattern analysis right (link), they cannot even set up a sensible device performance test after they were lectured and informed (link).

Myoelectric technology from perspective of a person delivering real work, in other words, a physically demanding user, is a Dead Horse (link).
So it is with a mixture of surprise and amusememt that a seemingly never ending thread of ideas (e.g., [17]) digs deeper and deeper into our bodies, expanding the scope of cleary nonsensical applications further and further (link).
There is nothing sweeter than to be able to say “I told you so” tops the statememt “Paralympic Gold is better than sex”
There are a few really good amputee jokes. Invariably, good amputee jokes will make you feel uneasy.
So a great joke is this one: What do you tell an arm amputee that you incidentally meet standing on a sidewalk? — Nothing – he has been told everything already. This joke clearly adds to the refreshing attitude of researchers that see us as “inherently unhealthy”.
A greater joke is that for amputees, Paralympic Gold is better than sex. Not only is Paralympic gold as hard to get as Olympic gold generally, it is particularly hard for amputees because of the numerical point system geared towards leveling out individual disability differences. As people with visible disabilities such as amputees appear to be routinely regarded as permanently cognitively disabled by authoritative bodies in clinical research, it is no big surprise that the population in general seems to hold similar views (link), following through on old folk stories (link). So it is clear that such a populace will see amputees as entirely unable to have sex. Thus, having sex is the even more unlikely option than winning Paralympic gold, making this one of the great most cynical jokes of all times. And I guess we have readers that will get something out of that.
But what tops it all is certainly the ability to be able to say “I told you so”. When I (as arm amputee, also, among the various roles or aspects one might embody) go swimming in public pools, there are ample amounts of able bodied looking gentlemen of all ages that seem to try to race me. As I know from extended qualitative research by extracting sub-basis narratives (Fabian Virchow) from some of these, I know for sure that there is nothing worse than having to go home to say that they “lost against an arm amputee”. As non-disabled man, you cannot go home proudly saying you won, but you can for sure not admit that you came in second. So the struggle is on, and you should definitely avoid me being right on anything actually. It will be your hidden, undeclared, halfway declared or even open and honest premise that an arm amputee with a prosthetic arm is not quite fully human, but one without such an arm surely cannot come even close, so it is you that really needs to wiggle now, under that premise.
In 2008 I stated that it will become 2018 and a prosthetic arm with a body powered hook will still be by far the only viable solution for real work. You all let 10 years pass, while I was busy (see above), and I am right – regardless of what it was you all stated back then. When I now say that there is nothing better than to be able to say “I told you so”, it is that I base this on very bold statements of the past that became true now.
With that, I will boldly predict that another 10 years will go by and you will still not be able to present a prosthetic arm that works better than a body powered hook or gripper for real work.
The reasons are manifold and complex, and probably require a separate dedicated blog post about the complex way how powers and stake holders influence each others. Reversely stated, it was once 1978 and there were also all the political, financial and technical options open for the improvement of prosthetic arms for the benefit of amputees. None of the chances that were taken resulted in any other outcome than when I started to become interested in using a prosthetic arm in 2008, it was 30 years later, than 1978 and nothing, no one, prevented that prosthetic body powered hooks absolutely prevailed in the domain of real work. Of course, we still have companies still building cable housings that cause the steel cable to break every 4-10 days under full load, we still have companies selling thin stringed figure-9 harnesses, but overall, research and development was set up so this outcome was almost hard-wired. The underlying problem is to a significant part explained by a lack of functional focus and a predominant focus on practically useless research and development. And that is cemented, hard-wired, by the sociology of your own predicaments.
If you want to move from a current industrial level of total failure (with an engineering that is so bad you all would scream murder and at least 85% of potential customers running/staying away) into the realm of just halfway useful prosthetic arm parts, you will have to significantly shift significant attitudes of mountains of various other people, that already succumb to the rubber hand illusion on various higher levels. That alone shows you the power and danger of adopting or promoting a rubber hand illusion that, instead, threatens to possess you. And, as I will clearly predict: you will not be able to do that (Wolf Schweitzer, 2008, 2009, 2010, 2011, 2012, 2013, 2014, 2015, 2016, 2017, 2018).
Best quotes ever:
- In 2028, a prosthetic hook will STILL be by far the best device for real work (Wolf Schweitzer, 2018).
- In 2018, a prosthetic hook will STILL be by far the best device for real work (Wolf Schweitzer, 2008). Check.
Before we forget: what are actual improvements of prosthetic arms that are relevant and tangible?
We cannot discuss body image without referencing actually positive use of prosthetic arms in a true application context where they really work. They can be the best tools ever – if one approaches the design, test, use, and wearing task frrom that angle. Then, one will be in tune with the spirits of sensorimotor extensions that are fixed with screwdrivers or new plastic parts, so to say.
Toughware Equilux
Developed by Bradley Veatch. This device was the game changer of 2017. It still is. It is a switchable VO/VC device and as far as I know, it is the only one of its kind out there.
Monestier hand
Developed by Jacques Monestier. This hand goes far further than any prosthesis in being a truly beautiful prosthetic hand.


TRS developments
Developed by Bob Radocy.
These devices are extremely functional and useful, They are well made and reliable. They are the material to wear in any instance. Bob Radocy won the Cybathlon 2016, a test that had been pushed to possibly reflect sensible use of a prosthesis, and that somewhat managed to approximate that. His devices are so good that even a new group in Switzerland, Swiss Prosthetics, started to try to copy that approach.

Bike modifications
Own stuff.
I performed a few adaptations, developments and improvements myself.



Being able to really take physical life a lot further
It is the big things that count, fellas.
Performing a plus 800 m bike ride in a good half day just as one day in a nice holiday.

Riding up the Stelvio pass from the side of Prado, and, all the way around.





Even though a lot of the actually positive achievements were made outside any official R&D channels, they definitely occured and will occur in the future.
Discussion
When R&D fails the real workers (that are among us arm amputees and depend on real prosthetic arms), as it does historically, routinely and ongoing, people such as me will work their way using straight power leveling.
That seminar in Mannheim, and related discussions, raised a number of interesting questions though.

Question 1: does it have to be that direct? – I GUESS SO..
I guess so, but I fear that you have not experienced truly direct yet.
I have chosen a more or less direct path to any prosthetic solution regardless of possible obstacles.
If you feel that I may be somewhat more direct than you please, you have to realize that I have to make up for at least ~30 years of sloppy, neglectful R&D governance and below-standard CE-product markings [link] outside my circle of influence. You should lean back and reflect on the absolute numbers of failure and decay, and on the fact that it cost me a sizeable amount of life time, time, work time, money and energy to wear a stock componentry built prosthesis – far more energy than I will suggest that many people invest in their work or activities. And I do not find it “fascinating” – if you work hard, this is existential. We then may silently stare at manifestations of absence of any respect of clinical researchers that are treating any disabled person as fully cognitively impaired [link] and let that sink in. If you do not get that these different planets of research and real life are in considerable misalignment, I can explain it using real rather than euphemistic language, too.
As real work delivering person with, initially, neither time nor interest in the field of prosthetic arms, I inherited a large pile of issues, none of which are even remotely pleasant or nice. If you cannot infer from the above stated decay and damage cycles just how much chagrin, anger, hate, despise and focus is summed up per week by a hard working prosthetic arm user, there are absolutely no polite options that remain to explain your condition I am afraid. It is the explicit state of affairs currently, that so clearly defines my ongoing predicament, and there is no time to dick around. The engineering aspect as such, with an assumed planned obsolescence, combined with an absolutely snotty solid arrogant attitude of manufacturer “customer service” and the likes, are man-made specifically to entice and fuel real negative feelings. I am definitely not the only one that feels this. With that, you are likely to badly burn your fingers, to say the least, if you start trying to get users to even more “adopt” prosthetic arms as “owned body-parts” than they already do, or hope to do, not by way of better engineering but by way of neuro-psychological trickery.
Question 2: is the actual practical result of the current overall situation, that amputees struggle in a “survival of the fittest” game? – YES
Of course.
It is a survival of the fittest: only the sufficiently clever, sharp, networked, technically aware, and focused amputee can turn around situations to get a better prosthetic fit. Only with really good connections, that are not a given, ever, I can leverage my own power options to get better parts. And you communicate in a terrain that is not just nice. It may be hostile.
Enforcing discussion on eye level, enforcing trade equality and measuring with equal measures, with prosthetists, was and is always that: enforcing.
The feeling is that of a permanent vertical ascent. It is the feeling of having to drag a dead cow over the Piazza San Marco single handedly, with a torn out painful long biceps tendon, with an epicondylitis lateralis, and an unstable scapholunate carpal and TFCC wrist part of the chronically overused hand and arm. That is how it feels like, day by day, hour by hour. Wearing a prosthetic arm that successfully holds up to real work is not a bit more romantic than that but at least it is great technical support.
Question 3: are the prospects still bleak to get well fitted functional arm as average customer ? – YES
For anyone else, even as customers at my prosthetist’s office, the prospects to get a truly well fitted superbly robust arm are as bleak as always.
I was sitting in a customer area, separated from the next customer area by just a curtain. I had a prosthetic arm with well published user based innovations, all of which my prosthetist has, and, had, available, to sell to anyone else. The customer sitting in the “cabin” next to me, separated by and behind a curtain, complained: his wrist would wiggle (I built a sturdy wrist with great support of my friends and my prosthetist knows where to order it and insurance has approved it more than once), his cable would always break (I had built and patented a massive improvement, made the first few prototypes myself, suckered my prosthetist into perfecting the build, and issued them a verbal free pass to use that patent for any other client, and insurance had approved that as well) – and the same prosthetist that builds my own stuff told that other client, no, unfortunately that is how bad body powered arms are, if you want better you need a myoelectric prosthesis. If you have a prosthetist office that does business with you like that, you do not have to worry about disillusioned users becoming rejectors by the numbers and by the scores for decades to come.
Question: where to obtain funding? – GO FOR THE JUGULAR TECHNICALLY AND WHEN SEEKING FUNDING
As far as project funding is concerned, I went to my disability insurance for part building funding. Or reversely put: I went to that major stakeholder that has real financial interests in seeing this end as well as possible. With everyone not listed there other than insurances, I guess that says it really all. You can spell that one out yourself.
My approach was as cut throat utilitarian one as you might imagine. We were fast and extremely solution focused in development, going for the jugular along all steps. We were efficient and thus cheap, compared to the outcome. Our results were and are perfect, particularly given the effort and requirements.
Part of that is a ruthless testing and evaulation with necessary abandonment of blocked, stalled and dead technologies (link JNER). Who does not recognize that myoelectric control is not fit for real work risks to lose a lot of time and reputation along the way simply because that stuff drags you down, functionally. To pick actually viable technologies is entirely crucial for a fast and rapid success.
Conclusions
Research and development in itself is never bad. It is free of connotations. The specifics are what matter here.
C0: As researcher and as industrial component builder, you must build a prosthetic arm, not a rubber hand illusion
As stated above, rubber hand illusion is an idea that, by and large, was somehow transformed into multi-sensory rubber hand illusion, and they now want to put it into prosthetic arms to make users believe the prosthesis belongs to their bodies.
There are a number of serious caveats with that belief: first of all, rubber hand illusion are now suggested to be subject to suggestion effects, and thus may not be actual “evidence” in a strict sense of a true neurological phenomenon with a reliable neurological foundation [1]. Secondly, arm amputees may not embody any hand-like, or anatomical extremity-like, representation of their prosthetic arm, at all, but, instead, it appears that they actually embody a prosthetic arm as a distinct entity [2].
This means that as arm amputees, we perceive and register a prosthetic arm as a distinct entity, that of, well, a “prosthetic arm”. This comes with its own unique set of sensory and motor experiences. If you want to succeed, as manufacturer, you must build a good prosthetic arm – and not any illusion or approximation of a hand-like appearance thinking that it tricks our minds into believing that we now have an own natural hand. That path seems to be a rather significant fallacy.
C1: Wearing a conventionally built commercial stock component containing prosthetic arm can be an absolutely hope shattering, time wasting and financially expensive experience and as that often if not usually is the case, no wonder many people are rejectors or non-adoptors
Now, a lot has been said to allow you to better understand that the whole list of serious problems that is loaded unto you as user of a prosthetic arm, covering also the human factors such as contacting the “customer service” of manufacturers, talking to prosthetists about rejecting their technically insufficient work, but mainly focusing on the permanent skin injuries to the stump, the frequent cable breaks, the irritating wrist wiggles, the disabling chronic congestion eczema that has Ossur not even answer their help desk mails, the neurological risks when wearing a standard figure-9 harness, all in all combined with usually only marginal gains, the frequent telephone calls with insurance.
If you now want to go ahead and make this type of attempted device, this type of “solution”, this planned obsolescence project part of someone’s body image, you sure need good seat belts because that may backfire catastrophically. And now that this has been stated here, it is not possible to make it unsaid.
C2: The rubber hand illusion is also a sizeable risk on all levels, because ego-centric body image included “ownership” has no nice exit strategies
Consider rubber hand aspects on all levels.
Amputees are a population with a high degree of prevalent sub-clinical depression. If you are totally sure, that you want them to deal with an increased level, density, pressure and tension of issues, go ahead with continuing rubber hand illusion work whatever you believe that it represents to you – but given exposure to real loading and current hardware, the backlash may be severe.
You can promise and arm amputee a feeling of owned prosthetic arm integrated into body scheme and all – but if that device fails, it also fails as body part, and the reaction is not “oh”, and “let us get the oil can”, but sadness, grief and other feelings of truly feeling dismembered all again.
So, the rubber hand illusion in any sense – stricter or wider – comes with tyrannical and non-rational, little reflected, impulsive and strong imperatives of owned body images and body perception, or on a wider scale, with tyrannical and irrational assumptions of project-related or profession-related view of roles of prosthetic hands or arms.
If you feel that an overly extreme “ownership” of an idea hampers, impedes, blocks or obstructs a cool, technical and goal-focused appraisal, then I would agree in that I also feel that an overly “owned” idea is a road block – and that pertains just as much to any direct “body ownership” of a prosthetic hand. Also there, a technical rather than a body-part role is to be achieved for the prosthetic arm, as the backlashes, the problematic aspects, the pain, the troubles, are the same. Combined with the usual lack of reliable hardware, the concept of rubber hand illusion may be doomed and expected to cause a far more violent and a more sustained rejection on a device level, or deep conflicts on a meta level.
Actually, history of actual occurrences is full of just such deep conflicts on a meta level. I personally feel I cannot afford that type of dynamic, as it is technically unproductive. Productiveness, technically, is the only value that actually counts in this context from a user view.
To mentally “own” a disjunct rubber hand, that lies still on a table, can indeed teach us about body image. But to transfer that model onto a prosthetic hand or hook, a prosthetic arm, that has a very clear rehabilitative task to deliver (which it mostly does not, causing all kinds of problems [link]), is problematic. If you do that, you succumb to slippage. We – as users – already hope too much, too severely, too highly, too tensely, that prosthetic devices “are us”, that they actually work, or that they “hold up this time”. We already suffer too much from these devices not even being the remotely useful tools we were promised, also by way of promotional materials [link]. This alone explains a drop-out or non-user rate of a realistic ~85% estimate: that disappointment can be existential, and it falls into a larger puzzle in itself [link]. If there is anywhere you want to start work on that big pile of problems, it is at the source of technical integrity of the average prosthetic arm being built. Currently, people seem to think that the LN-4 is a suitable device for developing countries [link] – a device that is, in my view, a functional catastrophe. If you bolt such devices into the souls of amputees, they will mourn the device´s death every day, every week, again and again – as the future of such devices is that of permanently repeated malfunction. We are already punished, injured, damaged, abraded, blistered, by wearing them in the best of all cases, leave alone in any average scenario. It seems to be a path you may not know of, or do not understand, or keep looking away from. Once you seriously have us become dependent on a prosthetic arm for our own perceived bodily integrity, once the device falls apart, we fall apart. I have seen people on social media, in support groups, talk about their failed iLimb or “bionic” arm, the device they used to define themselves over, that “made a big part of them”, that had failed in critical moments of their lives. They were devastated. They felt disenfranchised, stranded. With this feeling being the norm rather than the exception, there still is absolutely no net to fall in. We do not have any support that matches that level of intensity. It may be weekend, Saturday morning maybe, your all-defining “bionic” arm just died, and you desperately need it to function for a wedding party you were invited to as best man that same day. You fully define yourself over “bodily owning” that “bionic” hand but really, it is a faulty device that is built for obsolescence. Now, fix that. There is no way, right? Try to feel into a person that needs such a prosthesis as their absolutely integral part of their own, owned body.
The support structure is not just bad or absent, it is almost hostile towards many needs of fast, urgent or immediate repairs or replacement. As a user with own demands in the normal (“extreme”) range of performance, I clearly cannot rely on commercial manufacturers nor on researchers for solutions to my very practical problems. I need to mostly work out my own solutions and keep an eye open for the very few on this planet that build really useful prosthetic devices. While there may appear to be technical issues with that, this move also bases on meta-level rubber hand issues: too many stake holders have their own ego invested, some even distribute virtually useless prosthetic arms for their own pleasure and ego-boost [link], they seem to think we owe them on too many levels, when really this is a cut throat race of R&D to implement power and domination over amputees with extremely overpriced and sometimes quite ill-engineered parts that appear to be, at least in part, built for obsolescence, and our own cut throat race to build our own parts that we require. So it is their ego versus our bleak prospects, and for us, it is clearly a survival of the fittest and a sore and dire need.
If you want to continue exploiting that topical tension field, it may be not at all considered cool. We do not want to be that playing ground, where Wolf Schweitzer, who has been right about prosthetic arms in 2018, will also be right in 2028 just because you keep screwing up in bringing us rehabilitation that works. But I cannot see anyone who takes the needs that we really have seriously.
Body powered controls are the way to go for any real work. Real work is the only hard reason to wear a prosthetic arm and insurances know that. Body powered control is the only control that allows for long exposure, for interruption free manipulation, for task / work immersion, but for that, they have to be built well. Body powered control contains limited sufficient sensory feedback. Softer hand with less direct feedback have better grips as soft covers dampen the feedback.
Myoelectric arms are Dead Horses for the demanding user, the one that uses prostheses for real work. They have been since the Fifties. A myoelectric hand is so insufficient that a rubber hand expectations may only be achieved under laboratory constraints, and in any real life situation they will be met with more violent rejection in every day use accordingly. If you have adopted the subject or topic of myoelectric arms into what you believe you own, mentally, realize that you succumb to the rubber hand effect on a meta level. Read the risks and side effects again. You need an exit strategy.
C3: Slippage is a real risk with insidious problems
Be very apprehensive to slippage. Accountability, responsibility and relevance all are domain specific. Rubber hand illusion as concept is one thing. Dragging it over the plaza to make it play under a two-way sensory feedback setup, calling that “multi-sensory”, adding electric buzzing (as in TENS) and compression of the stump (by way of a prosthetic socket) to the experimental mix is probably not real science. Phantom pain itself appears not to be treated by just adding rubber to the man [5]. The specific effect must be elsewhere (link).
If you add a prosthetic arm, how do you separate distraction (as effect), compression to alleviate stump congestion (as effect, mediated by the socket), muscular activity increase in the stump (also reducing congestion) and random electric stimulation (rather than grasp-correlated stimulation).
[Bibtex]
@article{roseboom2020serious,
title={Serious problems with interpreting rubber hand illusion experiments},
author={Roseboom, Warrick and Lush, Peter},
year={2020},
publisher={PsyArXiv}
}[Bibtex]
@article{maimon2020artificial,
title={Is an artificial limb embodied as a hand? Brain decoding in prosthetic limb users},
author={Maimon Mor, Roni O and Makin, Tamar R},
journal={Plos Biology},
volume={18},
number={6},
pages={e3000729},
year={2020},
publisher={Public Library of Science San Francisco, CA USA}
}[Bibtex]
@article{edmond2016legal,
title={Legal versus non-legal approaches to forensic science evidence},
author={Edmond, Gary},
journal={The International Journal of Evidence \& Proof},
volume={20},
number={1},
pages={3--28},
year={2016},
publisher={SAGE Publications Sage UK: London, England}
}[Bibtex]
@article{petkova2011perspective,
title={The perspective matters! Multisensory integration in ego-centric reference frames determines full-body ownership},
author={Petkova, Valeria Ivanova and Khoshnevis, Mehrnoush and Ehrsson, H Henrik},
journal={Frontiers in Psychology},
volume={2},
pages={35},
year={2011},
publisher={Frontiers}
}[Bibtex]
@article{ournalpone0052400,
author = {Mohan, Rahul AND Jensen, Karin B. AND Petkova, Valeria I. AND Dey, Abishikta AND Barnsley, Nadia AND Ingvar, Martin AND McAuley, James H. AND Moseley, G. Lorimer AND Ehrsson, Henrik H.},
journal = {PLOS ONE},
publisher = {Public Library of Science},
title = {No Pain Relief with the Rubber Hand Illusion},
year = {2012},
month = {12},
volume = {7},
url = {https://doi.org/10.1371/journal.pone.0052400},
pages = {1-7},
abstract = {The sense of body ownership can be easily disrupted during illusions and the most common illusion is the rubber hand illusion. An idea that is rapidly gaining popularity in clinical pain medicine is that body ownership illusions can be used to modify pathological pain sensations and induce analgesia. However, this idea has not been empirically evaluated. Two separate research laboratories undertook independent randomized repeated measures experiments, both designed to detect an effect of the rubber hand illusion on experimentally induced hand pain. In Experiment 1, 16 healthy volunteers rated the pain evoked by noxious heat stimuli (5 s duration; interstimulus interval 25 s) of set temperatures (47°, 48° and 49°C) during the rubber hand illusion or during a control condition. There was a main effect of stimulus temperature on pain ratings, but no main effect of condition (p = 0.32), nor a condition x temperature interaction (p = 0.31). In Experiment 2, 20 healthy volunteers underwent quantitative sensory testing to determine heat and cold pain thresholds during the rubber hand illusion or during a control condition. Secondary analyses involved heat and cold detection thresholds and paradoxical heat sensations. Again, there was no main effect of condition on heat pain threshold (p = 0.17), nor on cold pain threshold (p = 0.65), nor on any of the secondary measures (p<0.56 for all). We conclude that the rubber hand illusion does not induce analgesia.},
number = {12},
doi = {10.1371/journal.pone.0052400}
}[Bibtex]
@article{rohde2011rubber,
title={The rubber hand illusion: feeling of ownership and proprioceptive drift do not go hand in hand},
author={Rohde, Marieke and Di Luca, Massimiliano and Ernst, Marc O},
journal={PloS One},
volume={6},
number={6},
pages={e21659},
year={2011},
publisher={Public Library of Science}
}[Bibtex]
@incollection{muilenburg1989body,
title={Body-powered upper-limb components},
author={Muilenburg, Alvin L and LeBlanc, Maurice A},
booktitle={Comprehensive management of the upper-limb amputee},
pages={28--38},
year={1989},
publisher={Springer}
}[Bibtex]
@article{doeringer1995performance,
title={Performance of above elbow body-powered prostheses in visually guided unconstrained motion tasks},
author={Doeringer, Joseph A and Hogan, N},
journal={IEEE Transactions on Biomedical Engineering},
volume={42},
number={6},
pages={621--631},
year={1995},
publisher={IEEE}
}[Bibtex]
@article{plettenburg2003voluntary,
title={Voluntary closing: A promising opening in hand prosthetics},
author={Plettenburg, Dick H and Herder, Just L},
journal={Technology and Disability},
volume={15},
number={2},
pages={85--94},
year={2003},
publisher={IOS Press}
}[Bibtex]
@article{dhillon2005direct,
title={Direct neural sensory feedback and control of a prosthetic arm},
author={Dhillon, Gurpreet Singh and Horch, Kenneth W},
journal={IEEE Transactions on Neural Systems and Rehabilitation Engineering},
volume={13},
number={4},
pages={468--472},
year={2005},
publisher={IEEE}
}[Bibtex]
@article{tsakiris2010hands,
title={Hands only illusion: multisensory integration elicits sense of ownership for body parts but not for non-corporeal objects},
author={Tsakiris, Manos and Carpenter, Lewis and James, Dafydd and Fotopoulou, Aikaterini},
journal={Experimental Brain Research},
volume={204},
number={3},
pages={343--352},
year={2010},
publisher={Springer}
}[Bibtex]
@article{maselli2013building,
title={The building blocks of the full body ownership illusion},
author={Maselli, Antonella and Slater, Mel},
journal={Frontiers in human neuroscience},
volume={7},
pages={83},
year={2013},
publisher={Frontiers}
}[Bibtex]
@article{hohwy2010explaining,
title={Explaining away the body: Experiences of supernaturally caused touch and touch on non-hand objects within the rubber hand illusion},
author={Hohwy, Jakob and Paton, Bryan},
journal={PloS one},
volume={5},
number={2},
pages={e9416},
year={2010},
publisher={Public Library of Science}
}[Bibtex]
@article{kalckert2014spatial,
title={The spatial distance rule in the moving and classical rubber hand illusions},
author={Kalckert, Andreas and Ehrsson, H Henrik},
journal={Consciousness and Cognition},
volume={30},
pages={118--132},
year={2014},
publisher={Elsevier}
}[Bibtex]
@article{flor1998cortical,
title={Cortical reorganization and phantom phenomena in congenital and traumatic upper-extremity amputees},
author={Flor, Herta and Elbert, Thomas and M{\"u}hlnickel, Werner and Pantev, Christo and Wienbruch, Christian and Taub, Edward},
journal={Experimental Brain Research},
volume={119},
number={2},
pages={205--212},
year={1998},
publisher={Springer}
}[Bibtex]
@article{van2013sensibility,
title={Sensibility of the stump in adults with an acquired major upper extremity amputation},
author={van Gils, Willemijn and Reinders-Messelink, Heleen A and Smit-Klaij, Frida and Bongers, Raoul M and Dijkstra, Pieter U and van der Sluis, Corry K},
journal={Archives of physical medicine and rehabilitation},
volume={94},
number={11},
pages={2179--2185},
year={2013},
publisher={Elsevier}
}[Bibtex]
@article{journalpone0207659,
author = {Schiefer, Matthew A. AND Graczyk, Emily L. AND Sidik, Steven M. AND Tan, Daniel W. AND Tyler, Dustin J.},
journal = {PLOS ONE},
publisher = {Public Library of Science},
title = {Artificial tactile and proprioceptive feedback improves performance and confidence on object identification tasks},
year = {2018},
month = {12},
volume = {13},
url = {https://doi.org/10.1371/journal.pone.0207659},
pages = {1-18},
abstract = {Somatosensory feedback of the hand is essential for object identification. Without somatosensory feedback, individuals cannot reliably determine the size or compliance of an object. Electrical nerve stimulation can restore localized tactile and proprioceptive feedback with intensity discrimination capability similar to natural sensation. We hypothesized that adding artificial somatosensation improves object recognition accuracy when using a prosthesis. To test this hypothesis, we provided different forms of sensory feedback–tactile, proprioceptive, or both–to two subjects with upper limb loss. The subjects were asked to identify the size or mechanical compliance of different foam blocks placed in the prosthetic hand while visually and audibly blinded. During trials, we did not inform the subjects of their performance, but did ask them about their confidence in correctly identifying objects. Finally, we recorded applied pressures during object interaction. Subjects were free to use any strategy they chose to examine the objects. Object identification was most accurate with both tactile and proprioceptive feedback. The relative importance of each type of feedback, however, depended on object characteristics and task. Sensory feedback increased subject confidence and was directly correlated with accuracy. Subjects applied less pressure to the objects when they had tactile pressure feedback. Artificial somatosensory feedback improves object recognition and the relative importance of tactile versus proprioceptive feedback depends on the test set. We believe this test battery provides an effective means to assess the impact of sensory restoration and the relative contribution of different forms of feedback (tactile vs. kinesthetic) within the neurorehabilitation field.},
number = {12},
doi = {10.1371/journal.pone.0207659}
}