The Cybathlon 2016 was accompanied by publicly broadcast video documentation of the event.

(C) Giphy
It is just not just as systematic as one would wish for a comprehensive research and development setting, but then, it was not an academic research event, but a publicity performance. But still, it contains a plethora of technical references.
Grip geometry failure of the iLimb
The iLimb exhibited a few situations of failure where specific design issues caused the user to run into problems.
A solution to these in a first step is to understand the design problems and, as a user of that hand, apply work arounds. The second step might be for the manufacturer to fix the problems.A third option is to not use the iLimb for such problems as it currently is not designed for that. Its advantages may thus lie elsewhere.
Other devices have similar problems. Their designers may also benefit from this exhibit.
Object-gripper geometry mismatch
As conical metallic objects are usually absent from any ADL or work environments, most prosthetic hands are not purpose-built to handle these.
It thus represents a mostly academic (but not user relevant) test to see if a hand can grasp this particular item.
The iLimb is not very useful due to its grip geometry here. This is relevant only in the Cybathlon context.
If anything, it shows that there exists such a thing as an object-gripper shape mismatch – there are objects that a particular gripper shape cannot grasp well or not at all, as consequence of their respective shapes.
This particular problem is therefore rather uninteresting to address for further research and development – its solution will not impact the usefulness of the iLimb in a relevant way for all ADL (activities of daily living) and most work related grip situations.

So the reason the pilot failed here is because this task is not contained in most lives. It thus does not seem to make particular sense to build a prosthetic hand with a feature to reliably grasp heavy large metal cones.
Grip geometry coordination failure
As opposed to the cone grip problem above, the geometry coordination problem as outlined now is quite relevant.
The iLimb has no coordinated motorization. The fingers open and close, mostly synchronously, but at free angles for the thumb, and at varying speeds.
As things turned out, the particular design of a thumb and opposed fingers with unconstrained motion or drives is used across practically most current “bionic” hands – almost all 3D printed and commercially sold multiarticulated hands (with exception, e.g., of the Otto Bock Michelangelo hand) replicate exactly this configuration.
It is of relevance as it negatively affects one of the most user relevant grips that prosthetic arms can provide: the precision grip.
Gripping fabric failure – iLimb
We can very clearly see that the lack of a well coordinated grip configuration causes the thumb to run past the index finger in the following sequence, causing the pilot to not be able to grip the fabric sufficiently well.
The two design issues the hand has is a thumb that swivels passively with pressure transmitted on to it by an object that the other fingers displace during a grip, and, an uncoordinated thumb and index tip configuration for grips.

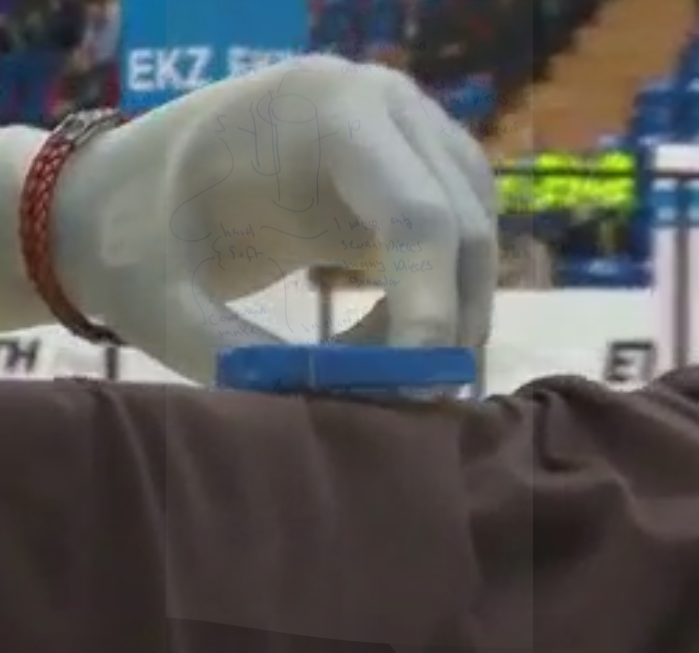
Gripping clothespin failure – iLimb
Here we can see the problem of the “precision” grip with the clothespin: the geometry of the iLimb fingers and the geometry of the clothespin do not yield a reliable dynamic geometrical grasp space with fully repeatable and thus reliable geometry.
The thumb is not clearly defined in its relative position towards the other fingers. This comes from both unconstrained drive, and passive thumb swivel.






Originally, the clothespin test was not designed to specifically highlight differences between unpredictable and predictable grip geometry. But it exposes this problem very well. Conversely, a TRS prehensor (that is the model that won the Cybathlon 2016 prosthetic arm race) contains two hollow shaped claws with rigid symmetric grasp configuration. Particularly with a soft surface added on, it almost automatically aligns a clothespin and thus makes it a lot easier to provide reliable grips for many objects, including clothespins.
The fact that the clothespin test was devised to exhibit body posture problems when using a multiarticulated hand but ends up exposing entirely different class of problems is typical for a whole research domain that dynamically evolves: the techniques that these very new prosthetic hands need to be controlled, tested, compared and improved all are only poorly understood yet.
This is where experienced users with an analytical eye can provide the crucial information that was missing.
Grip stability failure – prior evidence – Meltin MMI
While the Meltin MMI hand (a Japanese competitor) was not shown in any detail along all Swiss TV broadcast (we should evaluate the sceen presence times for all pilots for clarity here, to see who talks when and what and about what, given whose pilot’s footage), they have a product demo video up.
There, the grip of the Meltin MMI can be seen as passively deformable and not constrained with regard to thumb/ finger configuration. Much rather, the hand allows for a more contorted configuration.

Grip geometry coordination failure – iLimb – prior evidence
I first looked into this around March 2014. This is two years before the Cybathlon 2016.
The hand repeatedly works itself into a thumb-index off-position over just a few repeat cycles of the precision grip configuration.
The technical reason for this is the spatial disjunction by having unconstrained motor function drive the fingers. Glove hysteresis and if present object resistance will cause further delay of the fingers relative to each other, but untimed and unconstrained motor function sufficiently explains this behaviour.
Having an object being pressed against by index or other fingers may then cause the thumb to passively swivel, go out the way, by lack of sufficient fixation or counterpressure, rearranging the hand configuration within one or a few grip motions.
This starts with a clothespin and its spring force that acts on the thumb’s swivel or revolving mechanism. It may be a lot worse with larger objects.


The workaround to achieve a better precision grip reliability is to, each time before the precision grip has to function in an optimal, or, relatively best, way, reset the hand. One way is to fully extend all fingers, to achieve a well defined position of the fingers, and to then move into the precision grip in one continuous “close” action. If one only partially closes the hand, and needs to re-apply the grip, the hand must be fully extended again, before re-embarking onto the next attempt for a precision grip. One must not swivel the thumb, particularly not passively. Then, the chances are good that the finger tips of thumb and index finger perform a precision grip each time.
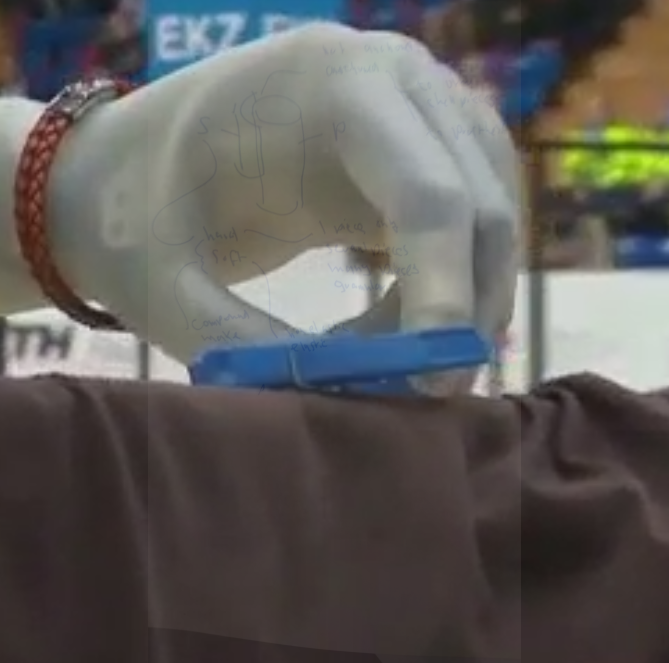
Grip geometry coordination failure – repeating clothespin problems
With an iLimb, not one grip is like the other.
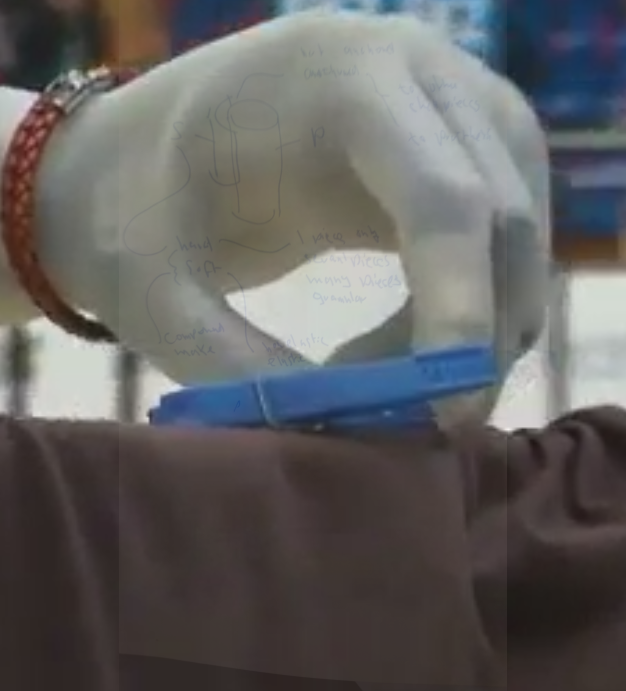
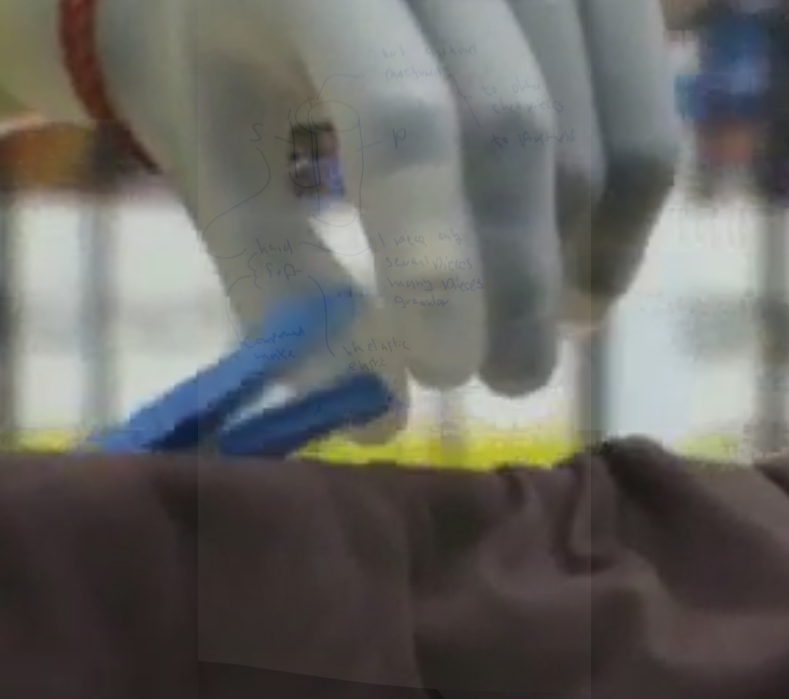
With a mildly misaligned thumb-index finger angle, the clothespin exerts forces back onto the thumb and pushes it out a bit further. This causes the grip to fail here (below).

The same can be reproduced without effort over and over again.

And …. yippie!

To avoid this, best to use a different device, or gripper, or also grip, for objects that have built-in counter forces such as clothespins.
General functional problems
There are problems that affect all myoelectric control devices rather than, specifically, the iLimb, that could be observed at the Cybathlon 2016.
Full loss of myoelectric control
We do not have proof of what affected this situation negatively, but quite clearly the hand has no electric control any more. What we see here is the usage of a myoelectric hand that has lost its electronic control.
From own use it seems apparent that when sweating even mildly and when sweating not even from physical but mental stress, electrode control can cease to function.
Even though we do not specifically know what the reason for absent control was, it is from an experienced user view (such as mine) extremely likely that a well service, recently fully charged iLimb can only fail here due to a sweaty stump skin surface.
Two things may occur: the socket can slip off the arm, which is not very likely here. And the sweat on the skin can impede the electrode function electrically, which is the most likely thing that happened.

It seems that a two finger extension push down method is elegantly chosen to fix the fabric in an attempt to close the zipper.







Now, the fingers seem to have gotten entangled with the fabric.

The jacket still is somehow attached to the fingers. Quite possibly, the hand cannot let go at this moment as the user moves her arm. This also indicates loss of control.

Insufficient grip power
The task here consists in completely removing the lid from the glass. The Touch Bionics employee here stands no chance of completing this task. The iLimb grip power is insufficient to open the jar.

Body posture interference
Body posture influences forearm (and thus, forearm stump) muscles while corrective motions are required to keep a hand (including a prosthetic hand) in place or moving it alongside a specific path.





The best way to totally avoid limb position effect is to keep a stiff elbow.
The reason is that bending or even extending the elbow can cause involuntary hand function to occur, so not bending or extending the elbow seems like a plausible solution.
To still be able to move the loop over the wire, thus, the pilot performs a subtle length axis rotation of her upper body towards her left.
Due to a rotation being circular and the wire being straight, obvious misalignment between the loop and the wire is to be expected.


From the above to the below image, you want to watch where (inside the loop) the wire is crossing. Between both images, a minute shift of the loop / ring away from the user is seen, placing the loop at a slightly increased risk of touching the wire.
If you watch closely you will see that the wire moves slightly below and to the right of the circular loop’s center – enough to make the user nervous and motivate them to provide a corrective limb movement.
The reason for that is because the user has a stiff arm and rotates through the upper body’s vertical axis, performing a rotation to the user’s left side to advance the loop over the wire.
The way to correct this rotational problem would be by core torso muscle action, or, through bending or extending the elbow, which – due to the limb positioning effect that is so well known – risks of inadvertently opening the prosthetic hand.

And that is exactly what happens.
The user leans back with the shoulders, while the elbow is slightly extended.
From the above to the below image, the subtle difference in position is the relative position of the wrist to the shirt collar / creases above it, and the relative position of the collar to the wire loop in front.
With that, the wrist can be observed to relatively move forward relative to her body position, which is an effect of the arm pushing forward with minimal elbow extension.
The user cannot other but stretch the arm a bit to find a less awkward shoulder and arm position to see this through.
And then, typically by having the brachioradial muscle activate the lateral / exterior electrode usually used for extensor muscles of the stump whose activation opens the hand, the hand opens when it should have stayed closed.
And that is exactly what happens in the next picture. Here you can see that ever so subtly the fingers already open and the hand lets go of the handle.

Now the device lights up as the loop touches the wire.

At that moment, that part of the race is lost as the loop touches the wire.
The animated sequence shows that towards the end of the motion where the error is made, a slight leftward leaning or back motion of the shoulder with minimal elbow extension triggers the positional interference.

Here, another pilot can be seen trying to grasp while extending the elbow. The grasp function (here with a BeBionic hand) fails most likely due to postural interference.

Even practice does not make that effect go away.
Body position interference – prior evidence
The fact that simple arm extension will cause the myoelectric device to perform an involuntary open motion is known since a longer time.
Concluding remarks
If one wears substandard device equipment and takes it to a performance critical event, one cannot look the other way.
Touch Bionics and the pilots have a history of trying to persuade clients, at least me, in the perception that if anyone, the user is at fault if the hand does not perform properly. For each and every problem I described, “therapeutic training” was advised. For true engineering problems, this is not a good answer. Worse, if the own pilots lose important score points at the Cybathlon 2016 because of this, there really is no rationale in persisting that all is good.
Now, I come from an extremely competitive sports angle (among other exploits, I qualified for and raced in the 2012 FINA World Masters Championship, swimming 100m freestyle, which was a NON disabled athlete event – so in other words, I swam world class of non disabled athletes, as a below elbow amputee, without extra aid or orthopedic support). As that, I was very well able to race “substandard equipment” (my own handicapped body, as seen by the uninformed bystander) in a “harsh environment” (non-disabled world class competition). But for that, I had to develop a very productive relationship with my handicap. More precisely, I had developed an asymmetric double kick side push kick kick type freestyle stroke that beat my previous performance by more than just a bit, and that took advantage of my strength (left arm, legs / kicks), and used the asymmetrically longer left arm stroke time for added fly kicks (powerful) while minimizing drag (most of the stroke cycle was swum with a body roll, the over-trained left arm with muscle mass kept out of the water for relatively long stroke cycle times). So my apparent problems were used to push to the max, exploiting the freestyle stroke constraint space in a spatio-temporal fashion. It was nothing else but adding regular sprint training buildup to complex puzzle solving. In 2016, I took gold medals for the master age class at the German Open (largest international swimming event for the disabled) over 50m and 100m butterfly, and I left my master category competitor behind also over 200m fly. So, tweaking performance to achieve top performances, relatively, can be done with “substandard equipment”.
Regarding grip coordination and geometry
With an uncoordinated iLimb grip inasmuch as hand motorization is concerned, you need pilots (and users) to understand exactly how to re-center the hand, and how to do so fast and routinely.
The iLimb can deliver one (1) precise precision grip, which in itself may not be really very useful due to tip geometry (another issue), and that is the very first grip if the hand is used to perform an uninterrupted close action right after resetting it to a fully extended position with thumb alignment. It is possible to do that, but impractical. With that, a pilot that competes certainly needs to perform drill training for this. Believing that the iLimb hand is perfectly good as is, is believing one’s own advertising.
The tips also need tweaking as they do not provide a usefully predictable grip geometry when closing in, particularly with the precision grip. Adding soft padding to the glove can be a way to improve here. Widening tips would be even better.
Regarding skin and sweat
To succumb to sweating and to suffer myoelectric control loss happens to everyone. For a particularly critical event, all measures to suppress sweat may have to be exhausted.
These may include the consumption of stress reducing treatment if not even medication if medically prescribed and supervised (for example, beta blockers) (as long as the Cybathlon does not ban doping and as long as the pilot is informed, agrees and is supervised), but also, anti perspirant use on the stump before take-off, or botox-treatment of the stump as recommended by some prosthetic technicians or doctors for excessive stump sweating.
Regarding body posture
A very useful trick to reduce these failure instances to 1/3 or so is to swap extensor and flexor electrodes. Another, better trick is to switch the hand off or to secure the grip through passive means.
The TRS prehensor, to make an everyday example, allows its voluntary closing mechanism to be blocked by the user after custom holes for preset positions were drilled into the device, and a spring-secured rod is inserted. Thus, one can easily handle a vacuum cleaner tube – a motion not too different from the wire loop requirements – super reliably.
All Cybathlon 2016 footage from (C) Copyright SF DRS Swiss television
