The TRS Prehensor [manufacturer> TRS] is a great gripper, and recently smoked all myoelectric competition (at a prosthetic arm side by side race at the “Cybathlon”, a public Circus event that the NCCR Robotics held for reasons that so far are not entirely understood at least from a prosthetic hand/arm user view).
A week has gone by since then, and still no public statement of the NCCR robotics organizers as to why body powered arm technology performed so much better than they anticipated, and worse, still no cogent clever research program drafted to successfully address prosthetic arm issues. Not a single tweet by Professor Riener and his team containing #cybathlon and #trsprehensor – so, in all sports and fairness, we are probably done with assuming this was all about sports. It wasn’t, and the communications very clearly show that.
The biggest issue at this moment for robotic researchers now may probably be: why is this possible? What happened? Can we lay down the reasons for that? Because keeping on missing out on any deeper understanding there will likely cause similar problems in the future – and we do not want that again, do we. There are deeply intriguing answers to these pressing questions. It is just that who has time to wait for these people! What takes them so long!
“I waited for 30 years for robot engineers to build me a prosthetic arm so I could finally clean up my house. It became a real mess during all these years. Three decades is a long time, you know.” – Anonymous
No peace for the wicked.
And so to clean up the house today, I used the TRS Prehensor. I massively intensified using it for many tasks since then. Now, I always like to use these opportunities to troubleshoot grips and see where I go with the result.
Wowoweewa!
As no product ever is absolutely perfect, the ones that can be tuned, the ones that can be bent, and loved into submission are the ones that end up being perfect.
As is, the TRS Prehensor has quite rigid PU claws. Most of you probably never cared to really look, leave alone ordering one so you could get a first hand understanding. But, trust me on that, it is quite rigid at its gripper surface.
As all material choices, there are advantages and disadvantages. The PU material used there is great on one hand as the harder the gripper material, the longer it lasts. However, the harder PU surfaces also cause a bit of a slip, particularly for objects with limited or no elasticity or deformability, and do not grip very small (and particularly hard) objects too well. Conversely, softer surfaces get used up, damaged, worn down faster, so they require a swap faster.
From a manufacturing view, you must keep the stability and robustness, material wise, of your gripper product at a reasonable maximum while making sure that the soft grip parts, the consumables so to say, can be replaced and swapped by the consumer or user at minimal efforts and minimal cost. Otherwise, you will lose them, simple as that.
The TRS Prehensor most certainly is a very, very mature product with refined features.But that does not mean we can not take this even further. With just two gripper claws and a four extension protrusion set on the fixed upper claw (see photos below), the technical requirements are all there to approximate an insanely wicked technical grip type embodied by the infamous bean bag gripper: using soft and mildly adhesive surface deformation to one’s advantage while ice skating on the pre-configured grip reliability already built into the TRS Prehensor.
While this bean bag gripper (above video) lacks opposing pressure, it brings about a perfect “Formschluss” (tight fit) by employing a vacuum to its surface. The same effect can be approximated so much faster and easier differently.
First, what did I install?
Tweaking the TRS Prehensor’s grip surfaces
Double sided thick soft sticky tape and a cut to size soft sheet rubber (red) as shown below.
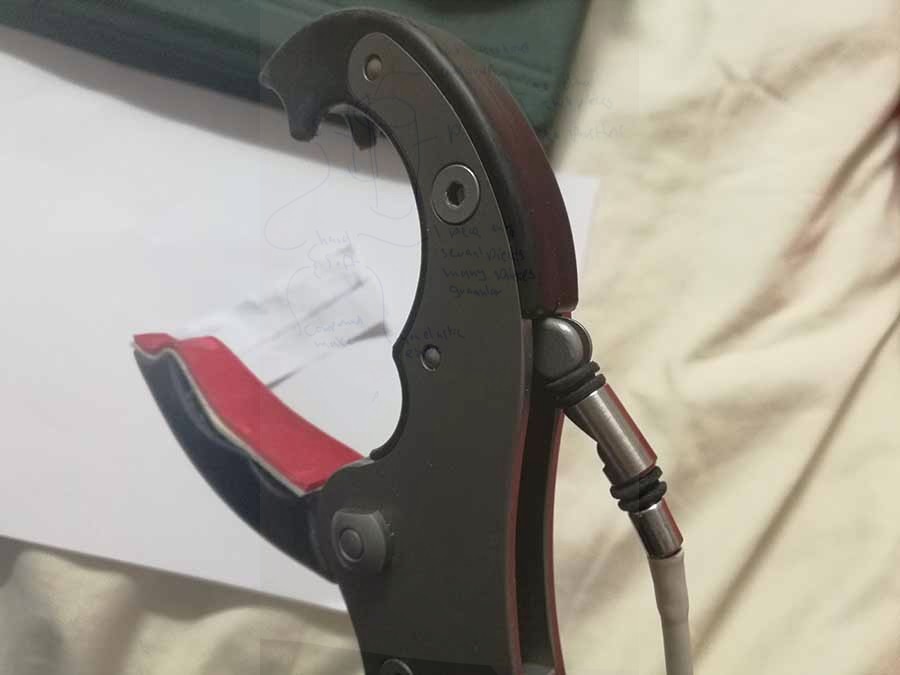
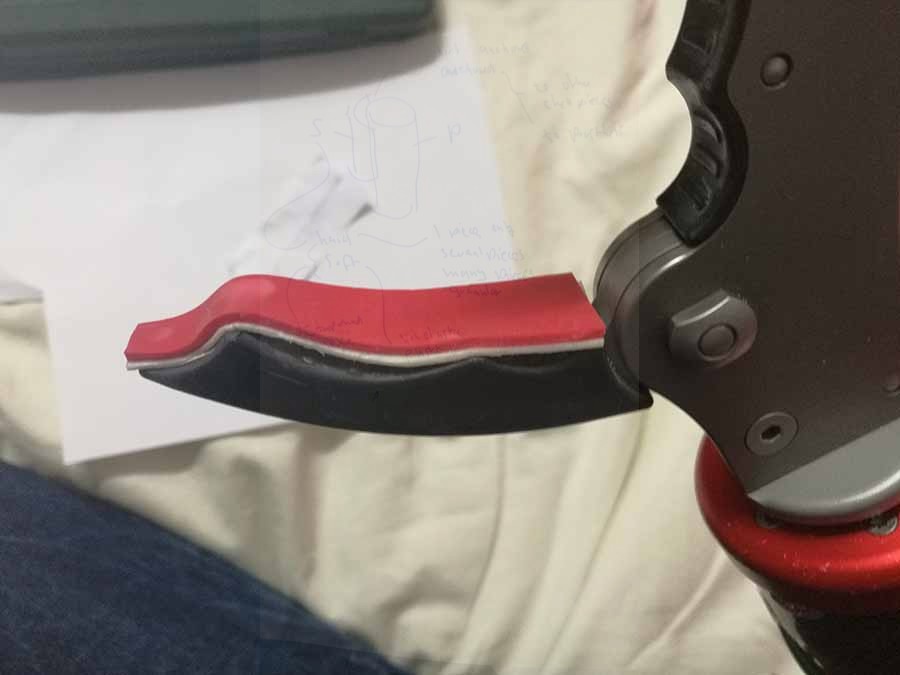
Then, I pulled one single finger of an ATLAS working glove that is nitrile coated over the lower claw to fix the rubber in place and add to the total surface enhancement. So now, the surface is deformable at a textile surface level that is also a bit sticky and non-slip coated (nitrile), while offering a minimal deformability with the underlying rubber and thick sticky tape acting as soft surface.

Then, I added a finger (here I just used the glove’s thumb) over the top claw.
With that, the shape difference between the gripper’s PU and the overlays that I placed there create a deformation space within which absolutely magic soft grip for small (or irregular, or particularly delicate) parts can occur. So with just a few modifications, I saw myself freebasing grip and manipulation power far beyond the beaten path.

The resulting grip effects – i.e., the results of this tweak, alright – are as advanced, also methodically, as they come. And at the same time, they are as affordable as they come. They simply combine great material science with mechanics. As all “robotics” with electric motors, batteries and gadgetry effects are avoided, the result is a still very light weight affordable prosthetic gripper device. The extra materials that I installed are not expensive at all.
There are a number of situations where the resulting technical advantage is *extremely* cool.
Watch this!
Clothespin grap sweep place motion
The Cybathlon featured the clothespin test hyped for prosthetic testing.
While it is not very usefulto test this as such,the new TRS Prehensor modification as shown here works towards using that device for a single sweep floor pickup and place on line of a clothespin. What took me longer was coordinating this with holding the cell phone camera for video recording.
But that grip is insanely great. It is intentionally weak and gentle, with practically no power being employed here top achieve grip stability – and it is reliable.

To take this into a detailed grip force planning space with force vectors and all, you would need some sophisticated software. Then see if you can use that software to solve for other problems.
Small plastic disc grip demo
I bet they did not include these in their tests as they could not perform this. But cleaning up my used up work bench (see remnants of silicone trying to refurbish my other Hosmer hook’s used down nitrile covers) small objects litter the surface and require getting picked up.

Small washer grip demo
The same “Formschluss” (surface fit) of the gripper surface against the object as indicated by prior studies (link) can now be seen in action here.

A similar effect, by the way, can be obtained by pulling soft silicone tubes over metal hook claws.
Color can edge grab
This new TRS Prehensor modification as shown here works towards using that device for grabbing a cardboard box only by its edge.
This grip performance for prosthetic hands / arms / grippers is currently unprecedented.

Cardboard box edge grab
Also, grabbing a cardboard box as shown here, just by its edge, has not been done and shown before for prosthetic arms / grippers / hands.

