Janet and John
Have Janet and John discuss this webpage and talk you through the key points here:
Executive summary
- Arm amputation is more a social (and complex) than just a manual handicap in many daily situations. Therefore many approaches to dealing with it are social and socially motivated, including hand color. You did land on a right below elbow amputation website, like, apparently, so that is the angle from which this comes. Also we made sure this is the title of this website. Different aspects may apply to higher level and bilateral arm amputation, but that is not the target of this website.
- Conversely, most actually manual problems are not major. What heavily impacts many unilateral arm amputees after 5-8 years or maybe after 10 -20 years, is the impact of overuse of the intact arm and asymmetry related problems. A rational approach to prevent that is to use prosthetic arms that excel particularly at the heavy to extreme range of physical exposure. Those are typically modern body powered arms. These use well established control principles, but can be made from very modern materials. They suffer from medial representations that are largely negative (“Captain Hook“). Myoelectric arms are termed “high tech” simply because they may contain a battery and motors, but they suffer from a battery of intractable or constrained problem combinations.
- For that, the ETH has so far not been necessary to add to the field of prosthetic arms, but trash culture approaches have a lot going for them regardless of that. My own practical and pragmatic research (see also below) contains such elements and now, the ETH also is proud organizer of a Circus freak show (which in essence is an event that lacks academic approaches and reduces intellectual participation to staring).
- Neither the ETH nor the NCCR Robotics ever managed to acknowledge that or develop even the tiniest solution to solve just about anything in that matter (remember the title of this page?). That is perfectly OK as quite possibly, myoelectric arms are uninteresting from an actual researcher point of view once one understands the full scope of problems, and body powered arms are uninteresting because their problems are a combination of mechanics, material science, and context dependent issues that usually require deep insights which is currently performed by a small relatively close knit international community of amputees, developers and researchers.
- Given their academic background claims, ETH or NCCR based approaches could and should have focused on studying intricate differences and aspects of prosthetic arm success and failure during the Cybathlon competition in all situations, pre-race and in-race. I mean: if you claim you want to do, or push, research, better sit down and work on a really detailed introductory explanation to show that we all see how much you understand what detailed features we are all looking for. I am most definitely all for that, but I do not shy away from weird staring contest evaluations either. These define an amputee’s daily reality more than you might like.
- But to no surprise, the technical research representatives neither prepared, nor carried out, such, so any technical analysis of the race that then was presented to the public to actually increase some real understanding for the effectively present research problems and real world issues so it will never be possible in sufficient detail or write any great scientific paper about it. Or, not from how it looks now.
- Thus, academically (not industrially, not as bystander, person that loves to stare at arm amputees or spectator), the event of the Cybathlon prosthetic arm race was a thoroughly missed opportunity if not a failure.
- This does not mean that the Cybathlon as such was meaningless; it just showed that body powered technology (TRS, TRS prehensor) as very calmly and perfectly performed and carried out by a 67 year old man (Bob Radocy) that did not visibly hurry but chewed gum for the whole event left all “robotic” competition behind – while I had warned the organizers from a one-dimensional overly simplistic evaluation two years ago. I had always told them exactly what Claudia Breidbach said in her statement after the finals race: you cannot compare, across various different arm amputation with adapted different devices, what a good performance is. They knew as they had been extensively informed beforehand. The search for what prosthetic arms should be able to actually do well remains ongoing though, the odyssey apparently continues with a Cybathlon 2020.
- And while any evidence based rational mind would now more than ever (a) want a body powered prosthesis and (b) further research on that type of prosthesis, it was the very clear aim by the organizers to not include these arms in the race at all, until I had imposed myself onto the organizers, had a very serious word with them and convinced them to admit also body powered arms which they did.
- The Swiss National Foundation (SNF) is strongly advised to look into the intricate aspects of all failures of (a) research opportunities missed and (b) strategic solutions actually needed in prosthetic arm and hand field, (c) appoint very competent coordinators and advisors there and (d) not finance silly “competitions” such as this that do not further science at all or (e) finance more myoelectric nonsense.
- All the same, the Cybathlon was a great experience in how ETH hype, tech media hype and gadget hand industry hype take a royal tanking against real life based real men, and, if you need a short but intensive read on the reasons why the myoelectric arms missed out today, check my Cybathlon Symposium scientific contribution, you will find there more relevant text than in many other places.
- I do not hate myoelectric arms. Personally I must have invested more finances into my own myoelectric gadgets than into my body powered components. However, that does not make me blind, dumb or gadget happy. I still test, look, think and analyze. I still work on finding better ways, solutions, parts or usage tricks for both systems. But then, coming from an engineering perspective (funny you come here to read that) – finding the exact problem, identifying the exact issue, has been placed before being ablt to solving it. And the simple beauty of engineering is, that whatever your attempt at covering up your tricks, at the end of the day, the contraption either works, or it does not.
- While Professor Riener verbally once (1) at the Cybathlon race itself mentioned the fact that cable powered technology won (we were there, see Gonzo report below), they made sure none of that leaked to the Swiss television, or BBC, or newspapers, or IEEE, or other press. They simply buried the fact that they were left eating dust by some very athletic older gentleman wearing a body powered prosthetic arm. Because that is like having someone in sandals and swim trunks run up on Mount Everest. They do not report that as it is seen as putting the other efforts to shame rather than being seen as someone, something, a situation to finally learn from. And that puts massive question marks to the news writers, tech representatives and researchers: is what you do something we have to believe, because quite clearly, facts are not consistent with it? Do you represent a type of religion or belief system?
- Not all are like that. The Scientific American, a journal that I am a subscriber and reader of since many, many years, reports extremely well, and explains the actual technical aspects of the winning device.
- The Cybathlon was announced as competition that allows visitors to “understand the issues surrounding disability in a practical way”. When not even the organizers understand these issues, and not even in a theoretical way, how on earth can they assume an ability to instruct visitors so they understand disability issues?
- The only actual comparison that makes real sense in a true rehabilitation setting is to compare one particular, optimized prosthetic arm, versus, another one, that is also optimized, when worn and used by the same amputee. The result then is to see which works better for that given individual. While this is the only actually sensible comparison from a true rehabilitative viewpoint, it is sorely absent, as a concept from the Cybathlon.
Trash Culture, the Cybathlon prosthetic arms race show Circus, and other prosthetic limb Trash Culture approaches
“Mommy, do I have to repeat every mistake others made before me myself?” – “Yes, one can learn so much from mistakes”.
Don’t get me wrong here.
Trash Culture is a great contemporary experience. If anything, this is what gets people talking. But it is not research or academic. This is not at all a critique, but an attempt to better localize this strange event in context of prosthetic arms, amputation and society.
It is just a Circus.
To unmake it a Circus and Make It a Technical Contest, a bit more attention to detail would have be needed. A lot more attention to detail would have made it a great event. That all was missed.
Now, I will supplement you with the required extra details below to make it a research observation despite the organizers successful attempts to keep it simple, hip, sexy and trashy …. but let that not spoil the fun for you.

We’ll get to the really interesting tech details and nerdy contestant infos in just a few. First, a word about Trash Culture.
Trash Culture and prosthetic limbs belong together.

Victoria Modesta, for example, was reported by Hugh Herr to have begged her doctors for 5 years until they ended up amputating her leg, after which she apparently started to wear stuff on her leg that would use up her knee so now she has constant pain there and Hugh Herr, as he said, has to remedy this with a new prosthetic leg.
As he reported yesterday, before showing a bit of her video there.
So we wonder were her doctors right about not wanting to amputate her leg.
Not that the general problem of asymmetry and overuse lurking behind the next corner for everyone of us required a world leading researcher to be pointed out: personally and myself, I pay very close attention to that since a while (link) and my current prosthetic arm design (link) reflects that.
If anything, it does require modern day ETH Cybathlon organizers to look past these aspects, to not see extremely elegantly combined mechanical design features stuck into their faces, while we have Otto Bock reportedly support amputee fethish photography and people employing wild ridicule regarding amputees – which contextualizes the Trash Culture circle with regard to prosthetic limbs and amputation a bit.
It is entertaining, involving, intriguing, fascinating and involving and to get “the public involved”, amputees always had a thing going in a way that begs to be explored, explored deeper.
Long before that, freak shows as part of Circuses catered for the enhanced visual interest of the general public (“voyeurism“) for rare biological occurrences (“freaks”) such as amputees, as it appeared, often with good financial (even though not scientific) success.
Because neither financing nor physical proximity of the rare biological occurrences of amputees generally and arm amputees specifically allow for frequent dissemination of operationally relevant support tips, arm amputees world wide use Youtube to swap tips and support ideas about how to achieve all kinds of manual success, with or, mostly though, without prosthetic arm on.
As a part of current popular culture, these videos are often better than any currently held Circus in town, of course, free of charge and very important news if you want to “fix” or learn about stuff with a similar handicap.
That culture of support brings with it its own subculture of nonsense, which can safely be counted to be part of entertaining amputee Trash Culture:
So, goofing around in public, with the public involved, get people talking, is an integral part of a raging Trash Culture already.
And let me tell you: you want to be a part of that, too.
Mannequin arm proof of concept works perfectly well to lubricate the talking aspect of everyday life
So the Cybathlon wants to “get people talking”.
Of course we know that the ones that get suckered into talking, at that stage, on that level, may not be the ones to build your prosthetic arm, or, even understand how the one works you are wearing right now.
But worse: as you must expect, “it has been done before”. To get people talking, with cheap visuals and prosthetic arms as context, that is what I mean.
The first time I practically implemented pure prosthetic arm Trash Culture myself was when I wore a shop window mannequin arm on my arm, and took a tram to downtown. It does not get so much more trashy than that, but boy was that fun.
That was in July 2009, a very long time before even our most contemporary cyborgs felt comfortable with anything but maximally skin colored prosthetic arms. So I was an unlikely sight, but chipper and confident with that arm there. As pioneers are : )

That mannequin arm was white, a bit scruffy, definitely a shop window mannequin‘s arm that could be recognized as that.
While that sure did not work a bit like one would assume that a prosthetic arm works, like, technically, with no hand to open or close, I got at least two women to talk to me (without need to) and hit me up right there, within 10 – 15 minutes.
The way it got people to open up and talking was without precedent!
Wearing a mannequin arm to town just for communication purposes, and hitting up women, as a male arm amputee, that is what I call pure Trash Culture.
And that in cold Zurich, where others may live for over two years, and not get to know a single person. Of course one might come to the conclusion that not all “Trash Culture mediated new friends” will be best friends ever, or even just good to hang out with, but that is beside the point: it worked totally well – as ice breaker.
So, I have been there, with the cheesy trashy shit, way before it became an internet or rent-a-stadium thing.
Trash Culture as that random approach
So in terms of interaction, Trash Culture is that sloppy, thoughtless and random approach that combines the convenient with the absurd, the useless with the funny and the crazy with the mad, and that evens out all momentary differences to achieve a new possibility for people to crash into each other.
An important distinction from Trash Culture presenting visually consuming displays, such as here of a double leg amputee, is the invitation to stare without cumbersome scientific or analytic questions or instruction book. You can just it, watch, and explore what it does to you.

Trash Culture work certainly has worked for those that engaged in it. It is an explorative process. History also tells us that it only worked a little bit. Because you get to know people fast – but those may not be the people you want to end up with. For that, far more careful technical and communicative distinction might be necessary.
Where does the Cybathlon prosthetic arms race fit into Trash Culture
Visual interest of the general public in rare biological occurrences such as arm amputees can be typically satisfied “as is”, with everyone happy they are just staring. Not much has to be invested in terms of test design.
That motivation has filled stadions before.
That type of event is not exactly Nobel prize winning science, but then that seems to be not a priority for our organizers here: here, we might never know any relevant details about the prosthetic arms being raced (unless you keep reading, further below) – but that was maybe never the point.
The Cybathlon prosthetic arms race parts of their public Circus booklet never covered the intricate relevant details one would need to actually understand the prosthetic arms race, nor did the “technical” “university” aspect win anywhere – and yet, they could have definitely sat down and have performed a very geeky, nerdy, detailed technical consideration of the race as it is done in the world of soccer, as example. But, no, this is a refreshingly unscientific presentation of the teams and what they do.
And that is alright from viewpoint of the general public taking a visual interest of the rare biological occurrence of arm amputees: the prosthetic arms race (and I am only commenting on that) might just end up as a crude massacre of bread loaves, and light bulbs.

(C) Copyright Cybathlon / ETH
Even though, admittedly, the visuals of the Cybathlon are somewhat unsettling. They stare at us, but really, everyone stares at everyone. Now with the focus being on the visual, check out these two images of “The Bearded Man” from the Cybathlon printed program (and I am *not* saying men should not wear pink every once in a while) that awkwardly resemble each other: this is Him! Why do they draw Him with a prosthetic arm on? Couldn’t they have photographed some real amputee?


(C) Copyright Cybathlon / ETH
Seriously, what’s up. The receding hairline is depicted well, though. But may we learn more. Why the ball, why not the keg? What does this mean, symbolically? Why did they not publish a drawing of Him, with a hook, though? Is that The Captain? Captain who?
Even though I admit that at this point, we probably all are happy we do not know what other images these ETH illustrators all made. Trash Culture appeal has its limits.
So, textual and visual dialog elements of a Circus, crashing right into the middle of Trash Culture shows, are undeniably there, at the prosthetic arms race of the Cybathlon, and images unsettling enough to go at least Whoa. Well done as a first.
Interesting detail: each participant for the prosthetic arms race has to pay a registration fee of 2000 CHF plus 500 CHF for an assistant and also look for their own insurance for the competition, and they “rehearsed”. After all, other Circus directors have to pay their acrobats, and they “train”!
Lightbulbs, bitch! – yo, lightbulbs man
The Cybathlon Circus parcours has arm amputees … put in light bulbs … with the prosthetic hand.
Light bulbs!? Hands?
Why should anyone use a prosthetic hand to do that.

I recently had my electric house installations undergo legally required periodical inspection and the certified electrician applauded my craftsmanship and congratulated me. So you read the blog of someone that knows a bit or two about using a prosthetic arm to install appliances.
Yes : ) I had installed all that stuff with, well, what do you guess, what prosthetic arm did I do that with? Body powered arm, true. Terminal device: Retro (a hook device made by Toughware PRX with insane spring and grip strength and a precise grip). Overhead work, no problem. Hardest grip for stiff copper wires ever. Not spectacular at all in the ETH “bionic” “Bearded man” sense – but precision overhead work with a body powered arm is seemingly unheard of for arm amputees. No person in their right state of mind will ever, however, put a light bulb in using a prosthetic hand or use that as a test.
Mostly, one has to switch bulbs after a presently installed light bulb is blown.
Upon light bulb removal, glass and metal or plastic connector may start to disconnect, particularly once a bulb is burnt out, due to years of sustained heat, and while the subtle glass grinding vibrations that precede a clear disconnect can usually be felt with a (normal, human) hand, the risk for a disconnect is considerable when unscrewing an old light bulb with a prosthetic hand. Like, you guys that are in tech, you would know that, right. Sure.

Secondly, a bulb is delicate and a new one to be put in must not be dropped and given the price of a bulb, it would be stupid to even risk a 1/10 chance of a fall. With a bulb priced at 5 CHF, using a prosthetic hand would then increase the price for 1 bulb to 5.55, which is over 10%, so telling people that it is a good idea to use a “bionic” arm for light bulb screwing basically is good business for the light bulb industry (and for those that sell these “bionic” arms, see above) (but nothing else). Basic economy does not hur
Now even though we have to place serious question marks for the field of engineering for some of the players here (what again was the story with body powered hooks?), finances seem to be every successful Circus director’s top domain. So if you were to get someone to put the light bulbs in for a successful Circus director, would it be the guy with the prosthetic “bionic” hand using that hand for the job? Or did you have a better idea? Where did you study engineering again? Do you know how light bulbs and prosthetic hands relate in relation to the mechanics of handling objects generally? Can you recreate a clear imagination of that?

Testing prosthetic arms versus their intended use or design specification
Trash Culture with the visual interest the general public is now paying to satisfy by being allowed to observe rare biological occurrences such as arm amputees may suffice in terms of ethical standards of a Federal Technology Institute.
But I am not always freebasing nonsense and trash.
I *can* mutate to extreme nerd and that can shock people when I do that: then, real researchers and real developers like me are more like this: we really want to know, what are the competitors really trying to prove? What is their engineers’ or doctors’ actual achievement? Where lies each contestant’s and contestant’s team’s individual achievement, technically? Where do they present difficulties? What is at stake, technically? That is my approach. And you cannot substitute a very sharp eye for the very relevant with trash culture. A future with more Cybathlons does not define success: it lacks all technical analysis. Staring at amputees is not sufficient because our predicament does not sufficiently disclose itself visually.
“Real performance” is something that is delivered consistently, over a sustained period of time. Clearly, I know this, as I work with this aspect over a long period of time now. A prosthetic arm that can deliver real performance is always ready. It needs neither extra preparation nor extra training. It definitely does not need any “rehearsal”. I carry mensa trays every day, never rehears, never dropped one. With a body powered arm. I cut bread as is, with the body powered arm, or, without one on. I never rehearsed life.
Prosthetic arms and the way they can be controlled
To appreciate the contest, you must understand the control basics for prosthetic arms. Of course, you would have found that in the booklet of organizers of a really scholastic competitive event of a real university but as outlined above, this is set up as visual orgy for people that want no verbal distraction while looking, so I supplement that for you here.
There are three control paradigms available for prosthetic arms, generally:
- myoelectric control
- body powered control with voluntary opening device
- body powered control with voluntary closing device
Very High Tech: body powered arms
The body powered control with voluntary opening (VO) device is what I have and what I wear almost always. It offers “real performance”.
You make a physical effort to open the terminal device and let it close, around an object you may want to hold, by itself.
It is very popular among body powered arm users and due to modern materials and design aspects can be made to withstand realistic work exposure that other manufacturers of prosthetic arms are dreaming of. It is the most successful system for everyday usage in my experience, and I have and tried them all. My arm (see also my Cybathlon Symposium poster) contains a bunch of relevant innovations and really, from view of both mechanic design, mechanical production and material standpoint, these solutions are absolutely path defining in terms of the applied problem that they solve.
If you asked me whether I wanted to pay you a registration fee of 2500 CHF so I could show you that I can cut bread or carry a box, in public, I might think you would be totally out of your mind, because there is really no question and it would be a pity to waste that amount of money. Probably, most others with that type of prosthetic arm are the same. Hence, and without surprise, there are absolutely no representatives of that control system (i.e., body powered VO) participating in the Cybathlon. While it was a clear intent of the organizers to discourage functional prostheses to compete there, they succeeded in that also by charging far too much money for what appears to be a non-sensical test, really. Trying to again prove that my prosthetic arm actually works would be as absurd as trying to prove to the world that you actually brush your teeth or that you take your trash out, and having you pay your own 2500 CHF to show it to Swiss TV. It would be a real waste of money. A Youtube video (which is how normal people compare performance of prosthetic arms, and which is free of charge) would be more than enough proof that voluntary opening prosthetic arms just work.
While it was a clear intent of the organizers to discourage functional prostheses to compete there, they succeeded in that also by charging far too much money for what appears to be a non-sensical test, really. Trying to again prove that my prosthetic arm actually works would be as absurd as trying to prove to the world that you actually brush your teeth or that you take your trash out, and having you pay your own 2500 CHF to show it to Swiss TV. It would be a real waste of money. A Youtube video (which is how normal people compare performance of prosthetic arms, and which is free of charge) would be more than enough proof that voluntary opening prosthetic arms just work.



If you feel like getting more “EC“, just do what I did and ride up the Stelvio Pass with your prosthetic arm.

Understanding Becker hands and cable control difficult for you? Let me know and I can fill you in.


Not that you really wanted to see just how fast and good these thingies are, right. You wanted to label these as “outdated”.
If anything, a lumberjack competition with prosthetic arms could be great fun – but only at the expense of the organizers, and if they (they!) get really, really good insurance for everyone involved.

This is well built technology that has a correct aim at the intended use.
Voluntary opening versus voluntary closing body powered arms
There are two ways to control a body powered gripper, voluntary opening (VO) and voluntary closing (VC). The difference is small in theory but substantial in application. VC is harder to learn than VO whereas both are far easier to learn than myoelectric arms.
Voluntary opening devices seem to be a lot more popular, and in my experience, they are really relaxing to wear for everyday use.
Whereas voluntary closing devices seem to be more of a specialty application, not quite as widely useful but indispensable for some work.
So, body powered control with voluntary closing devices are a different beast altogether. Thereby, a device only closes when, and as long as, the user pulls on the cable.
Once the user lets go of the cable tension, the device opens again, unless one has a special locking mechanism in place.
This type of control is great for operating pliers or other similar tools, such as scissors. It can be used to time the grasp and release precisely, and catch a flying object for example.
However, carrying an item over a larger distance requires both carrying and pulling the cable at once, which can be error prone and hard to accomplish.
That is why it is also not just as popular as far as I see it. It still may have to gain traction in the community. If you work in a job where you hold or carry stuff over longer periods of time, VO may just be a lot easier.
Bob Radocy is the only Cybathlon “pilot” to use a body powered arm. There, no skin electrodes or nerve implants but a mechanically operated cable control the terminal device’s grip function. With that, control is not subject to sweat, it has very fine analog grading, permanent sensory feedback as to resistance of the object and applied grip force, it allows for a positionally robust and reliable prosthetic device control, and it also runs very well in totally rough environmental conditions. You can use these for many hours at over 35 or 40 deg C outside, as no sweat amounts can disable the controls (unlike the myoelectric arms). You can perfectly well use them at -15 deg C whereas myoelectric arm batteries start to become less functional at cold temperatures. Also, their grippers can be fully built to sturdiness and grip maximization.
Myoelectric control
Myoelectric control using skin electrodes is the typical way to control “bionic” hands. It cannot be achieved with perfection, as there are significant errors. This is a method inherent problem that cannot be overcome.


Among other electrode malfunction or reduced contact problems, postural artifacts or limb positioning effects exist. Thereby, electrodes also may pick up an open or close signal when the user changes body or limb position without actually wanting to operate the hand. People that have this control system may involuntarily drop items, or, be unable to let go or open the hand in particular body or limb positions.
Also, sweat can and eventually will render a myoelectric control system useless.
Furthermore, as batteries and electric motors are involved with myoelectric arms, they might not work when it is cold. Last but not the least, radiofrequency interference may be a problem. Any competition with that type of system will most likely expose dropsies or hand freezes, sooner or later.
A few of the design innovations (Italian team, Canadian team and Swedish team) introduce new control systems that may have the capacity to improve on postural artifacts known from myoelectric controls.
The Italian team allows their user to use a body powered string to switch the device on or off; this does away with postural interference or limb position effect but it quite possibly requires a bit of extra time. It also remedies the sweat problem. The degree of grip and transport/grip safety will be markedly increased.To allow for proper testing of that feature, sweat and positioning effects need to be integrated into the test design.
The Swedish team introduces neural implants to peripheral arm nerves rather than myoelectric skin electrodes. This does away with the problem of having to place electrodes at the same place on the skin every time when putting the prosthetic arm back on; it also may improve the limb positioning effect depending on what nerves are cuffed. A proper test for this interface system, showing whether it is superior to other systems using conventional skin electrodes, is comparing the quality of the derived signals after putting the prosthetic arm on for 50 times or so. And testing for limb positioning may also help identifying a possible strength of this system.

Intuitive control
The Canadian team introduces a type of multielectrode control that aspires to be more intuitive. A problem with existing myoelectric control is that its restriction to opening and closing a prosthetic device requires the user to mentally focus. Without focus, the control may run out of hand/s. So for conventional myoelectric controls, a few years of training is necessary to make the user reliably proficient. Still, an experienced user might get confounded or mixed up when properly distracted.

So who benefits from a more intuitive control? Novice users, and distracted users. Any test to show how good intuitive controls are as opposed to not so intuitive controls will thus have to incorporate various degrees and types of distraction. Also, exposing a number of novice users to that system and exploring their performance at various stages is necessary to gain an understanding
Any test to show how good intuitive controls are as opposed to not so intuitive controls will thus have to incorporate various degrees and types of distraction. Also, exposing a number of novice users to that system and exploring their performance at various stages is necessary to gain an understanding about the achievement of a particular “intuitive” control system.
The drawback of multielectrode control is that they move signal quality from two electrodes with already debatably low SNR levels (signal-to-noise ratio) to some four, eight or more electrode sites with even lower SNR levels. That means, loads of garbage in, and unless total miracles occur, more garbage out. That is what we are looking for in multielectrode control systems.
Wrist connectors
Wrist connectors come in various shapes and sizes, and depending on the specifics they may be motorized.
Body powered prostheses usually either have a connector where a terminal device is simply screwed in, or, a quick release mechanism that allows the quick release and fixing of the device to rotate it, usually by using the other (biological) hand.
Myoelectric prostheses either have a fixed hand position, or, a passive wrist where the hand can be mechanically rotated with the other (biological) hand. There also exist motorized wrists that can be controlled using the electrodes.
Depending on the length of the stump, fitting a motorized wrist (which usually requires more depth or length) is not possible. I have such an arm, and cannot (technically) wear a normal motorized wrist.

The wire loop test in the Cybathlon is a test that proposes that it tests usage of a powered wrist; the essence of the test consists in the user switching rotation while performing the test. It has no apparent real word application correlate, and this consists in largely useless testing.
To test a wire loop using a manually switched wrist, or a fixed wrist connector, is basically pointless. Instead they could just test users pouring a liquid from a bottle. That could be error prone so probably, it makes sense to test it for users of such wrist units. Not for the rest.
And while the test really makes no sense from a user view, it will be fascinating to see what it really ends up testing.

Osseointegration
Osseointegration is presented by the Swedish team. There, a bolt was implanted into the bone of the amputated humerus. The advantage is a direct motion of the attached prosthesis. Disadvantages are possible infections and associated lifestyle restrictions, as well as possible fractures and associated repairs, re-amputation or other ways to fix the damage. Furthermore, this procedure is usually not covered by insurance and extremely expensive.
To test the claim that it is safe to swim with osseointegration, swimming twice daily for an hour each in Zurich public swimming pools for 30 days in a row will be a sensible test. To test the claim that a forearm osseointegration is stable enough to lift another person, weights of up to 130 kg can be lifted with two hands and it can be then determined what the osseointegration torque levels will be; from theoretical studies, osseointegration is fragile and not that stable. To test the claim that the method provides a more direct control of the terminal device that is of actual relevance, probably some type of aiming tests need to be performed.
Reality
In real life, most potential users will not be able to wear all of the aforementioned options anyway. In my instance, osseointegration and powered wrists are no realistic option. In other instances, for example, a body powered arm may not work.
Testing needs to usually see whether within one and the same user, a change in the prosthetic method used brings about improvement, and maybe in what way. To have different people perform against each other is neither realistic nor sensible, as that is not a requirement. In our job, there are virtually no time constraints but rather serious quality constraints, so I am not free to drop stuff all the time.
Instead, I am expected to keep materials and tissues intact, even if it takes a bit longer.
To avoid back, shoulder, elbow and wrist issues as well as carpal tunnel issues, I will spend time finding a better posture for doing certain things before doing them.
So my prosthetic arm usage is not a speed thing but geared towards better balancing and better bimanual help in an overall overuse risk and asymmetry issues situation.
We had Hugh Herr tell us at the Cybathlon Symposium that osteoarthritis is an issue that modern prosthetic devices need to tackle, and it is exactly there where I am on top of things. However, advising the Cybathlon organizers to conduct a responsible and sensible test was not successful. Instead, a Trash Culture event to satisfy visual interest in the rare biological occurrence of arm amputees was generated.
Expected differences for the prosthetic arms race comparing different control strategies
It is expected to see both myoelectric and body powered systems as well as differences between various myoelectric technologies to play out with relevance.
Myoelectric arms with two electrodes / signals usually are faster but there are more problems switching. Two electrode derived signals are already bad enough to start off with. But with multielectrode control, we can expect sufficiently bad signal qualities and thus, also longer times to reach reliably integrated output signals.
Grips / objects – board with various objects
The grips and objects at the first part of the parcours will not be easy to solve with a weak hand. Low compression can be made up for by using extra deformable or soft surfaces, so we expect to see intelligent setups to employ this.
So, the Russian model as well as the iLimb hand are really weak and will probably not work well.
Conversely, the TRS Grip 5 Evolution Prehensor used by Bob Radocy can exert as much grip pressure as required by the user as a voluntary closing device can in theory exert extremely high grip forces.
Also, the Otto Bock Michelangelo hand, as much as it may be too heavy for a few real world users, will probably perform well here.
Wire loop test
Any control system that is ever so mildly posture or limb position dependent in its reliability is likely to cause problems here.
As myoelectric controls inherently suffer from limb positioning effect, the only prosthetic control system that will be better here is one that does not.
While the targeted muscle reinnervation surgery that the Otto Bock Michelangelo hand pilot was supposed to have had supposedly could have remedied this very serious limb position effect problem for him, it may well be that the surgery did not yield that control improvement.
Usual two-electrode skin controls cannot work without drop outs by positional interference however, and with this test there is no way to avoid problems.
Switch strategies usually entail at least small prosthetic device movements if not outright jerks, so “switching” between, say, wrist and hand control, also just might fail that wire loop test right there.
The wire loop test was created to test wrist actuation. As generic test idea for below elbow amputees, that is of course stupid, because many prosthetic arm users do not wear actuated wrists for any reason. I do not wear one because there is no space for that. But as it turns out, the wire loop test does not discriminate this. Instead, the wire loop test turns out to discriminate between those that do succumb to limb positioning effect or posture interference, and those that do not.
Load tray, carry tray, door
Loading a tray usually requires fast joint elbow extension and grasp / release combinations. With a body powered VO hook, this can be done in absolutely blazing speeds (see ARM CAM video unloading a dish washer). Using a myoelectric arm can be done when fixing posture, or, when working posture with fixed elbow from knee and backs as then, limb positioning is less likely to cause ill effects on the hand state (open/close). However, this tray and door teset is massively easier to perform with body powered technology or, actually, without prosthetic arm on.
Cut bread, open tin
To cut a bread really well, best way to do it technically is to fix the knife in the prosthetic gripper and use the normal intact hand to hold the bread.
What happens when I do not use the prosthesis is that I use the stump to fix the bread, and cut it with the knife in my intact hand. All bread loaves cut that way will get squeezed and deformed as result. So if a prosthetic arm is to bring any advantage here it is to not deform the remaining bread loaf. That is what is to be gained by wearing a prosthetic arm for cutting a bread.
Hanging clothes, buttons, zipper, clothespins
All clothes hanging usually is easy if one has profuse practice.
Hands that offer a precision grip that is reliable work here, the others may very well not. So, the Bebionic hand worn by two pilots as well as the Russian hand, the Japanese hand and the two i-Limbs are a bad choice.
The TRS Prehensor (and maybe the Michelangelo hand) are the ones to use here. Hand wise, however, the Becker hand with its slighty indented finger tips is the one with the best precision grip known to me.
The clothespin test allegedly was introduced as test for grip power. It only makes sense if the same clothespins are used, world wide, when one starts considering standardization. If anything, I can offer the el-cheapo variation of clothespins, that have hard springs but that fall apart quickly when twisted. There is absolutely no rationale in “negotiating” these clothespins, say, with me, for example because their presence in my household is a defining reality.
Now, really, the clothespin test for prosthetic arms allegedly was introduced to evaluate “coordinated wrist flexion and grip control” in the context of overuse injuries. The only domain in any household where I see coordinated wrist flexion and grip control coincide with highly repetitive actions, however, are clothes, laundry, being hanged, on clothes lines. With clothespins. And to be frank, no right below elbow amputee (you DID forget this was the name of this blog, again, didn’t you?) (I can tell you what this is about all day long and you still will keep forgetting) will hang their three machine loads of weekly laundry using clothespins manipulated with their prosthetic arm. Furthermore, many unilateral below elbow amputees do not wear powered wrists that flex.
If you don’t know how laundry can be hanged without contorting oneself, you should really look at how a prosthetic split hook is designed. It takes a bit of body twisting off the hanging procedure. Really, you can only sensibly design this clothespin test as an expression of true belief in any reality of houshold management if you entirely, fully and comprehensively lack an understanding of true laundry hanging in large volumes. Laundry in good amounts first of all is weight, so your arm wants to be light. Laundry just needs to be hanged fast, so no time to dick around.
But one has to see whether the clothespin test here really exhibits a display and show of well coordinated wrist flexion / grip coordination. Otherwise it may exhibit stuff it was not designed for – and that might be bad news for those that thought they knew what that test was for ; )
Carrying items
Controls and posture usually interfere with myoelectric controls.
The only control system that is practically built for carrying items over a longer distance is body powered voluntary opening (VO) which is probably why it is so popular; VC systems require a particular lock, whether at the terminal device or along the cable.
If anything we expect myoelectric arms to perform a bit less well than the body powered system in this part of the prosthetic arm race.
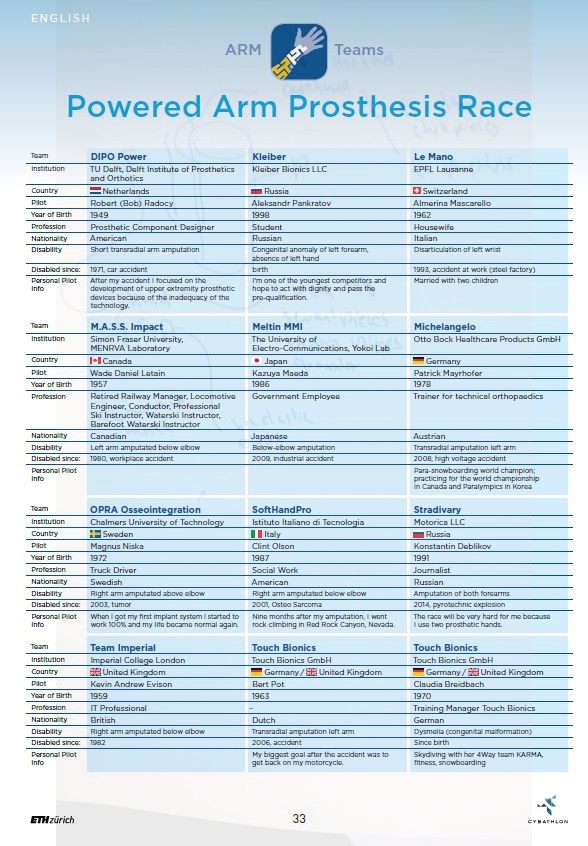
Details about the prosthetic arms race pilots with more details (basic information from the (publicly available) Cybathlon Program A4 (C) Copyright Cybathlon)
Pilots and their prosthetic equipment
| Pilot, affiliation, profession, personal pilot info, device / intended use, design specification and web link | Proposed testing |
| Bob Radocy, TU Delft,Delft Institute of Prosthetic and Orthotics,
Prosthetic component designer. “After my accident I focused on the development of upper extremity prosthetic devices because of the inadequacy of the technology.” The TRS prehensor is for everyday tasks with emphasis on dynamic activities and sports. Links: |
Dynamic testing in all aspects seems legit.
The voluntary opening devices that I use excel in a relaxed and safe experience for carrying and transporting items, also for very heavy pulling. Conversely, the TRS prehensor that Bob Radocy will use is a voluntary closing device. While it excels in precisely timed grasps – helpful to catch a flying object, for example – it can be harder to pull or carry a heavy weight over a certain distance as then, closing the device and pulling it in time critical applications can lead to increased control and task completion difficulty. Testing this device for specifics will require an array of tasks where voluntary opening and closing mechanisms of various kinds can be compared. Using pliers, scissors or other tools on a workbench would be useful practical tests here. |
| Aleksandr Pankratov, Kleiber Bionics LLC, student.
“I’m one of the youngest competitors and hope to act with dignity and pass the pre- qualification.” A new, “affordable” “bionic” prosthetic hand was designed, ostensibly not inferior in functionality and quality to import analogues. |
New hand with an adaptive cylinder grip.
These hands may have the problem of lacking a well coordinated precision grip and not being strong enough, particularly when covered with a thick soft glove. There, lack of precision grip occurrences may collide with absent need for precision grips in ADL. Testing these hands has to provide for detailed precision grip aspects as well as power of cylinder grip, under various hand cover options. Testing new hands can be critically important to making them better. |
| Almerina Mascarello, EPFL Lausanne, housewife.
“Married with two children”. This team works with surgically implanted electrodes, as well as covering sensory feedback. With that, courageous and surgical advancements are applied using an experimental prosthetic “smart hand”. Furthermore, intuitive control algorithms were advertised to be put in place. https://www.elmundo.es/salud/2014/02/05/52f27fceca4741b76f8b457b.html |
The “smart hand” as shown is a plastic and metal body with articulated fingers. It seems to be a research device, as anyone that ever ate pizza with a prosthetic hand may have to spend *hours* with soap water and a tooth brush trying to get that thing clean again. I once ate pizza with an ungloved Becker hand.
With that, an overly obsessive focus on grasp quality seems inappropriate here. This hand would require padding, and a glove. That aside, this setup seems to advance a qualitative aspect of prosthetic use – sensory feedback – and a very subjective aspect, intuitive control. To test whether controls are intuitive, you need to slap them on to a bunch of novice users and see how fast they can master the hand controls. Distraction also could play a role in testing intuitive control advantages. To test whether sensory feedback gives an advantage, scenarios where that plays a role need to be tested. Trying to find the thicker sports access card among thinner cards, all credit card sized, by feeling, from a wallet, is a typical task. Trying to feel the larger coin in a pocket containing smaller coins is such a task. Trying to handle grapes, or, raw eggs, is such a problem. So the test will have to have a user displace 200 raw eggs, one by one, as example. Quite possibly one of the most fascinating ways to spend time doing prosthetic hand research is spent implementing functions I did not miss anywhere. |
| Wade Daniel Letain, Simon Fraser University, MENRVA Laboratory
Retired Railway Manager, Locomotive The control of this otherwise unremarkable BeBionic hand is planned to be particularly intuitive. https://www.eurekalert.org/pub_releases/2016-05/sfu-srb050416.php |
To test whether controls are intuitive, you need to slap them on to a bunch of novice users and see how fast they can master the hand controls. No way to convincingly test control intuition with experienced and seasoned users with a history of mastering non-obvious controls too.
Interestingly in the featured video, Wade Daniel Letain actually talks about the difficulty to focus, and to stay calm. A true blue sportsman label may highlight a temperament that can be in the way of mastering a gadget controls race. |
| Kazuya Maeda, The University of Electro-Communications, Yokoi Lab, government employee.
The team developed a sophisticated EMG classification that allows for 11 different grips. |
It can mean anything and nothing to just offer “11 different grips”.
The pre-race specifications of this device are not specific enough.At least we know that the controls are somehow myo-electric. It could have been a task for the organizers to try to better characterize this competitor beforehand. Like, properly interview them, inspect the prosthetic setup. |
| Patrick Mayrhofer, Otto Bock Healthcare Products GmbH, trainer for technical orthopaedics.
“Para-snowboarding world champion; practicing for the world championship in Canada and Paralympics in Korea”. (LINK TO OTTO BOCK) |
This team just offers a standard Otto Bock Michelangelo hand demo. A self advertised assessment claims the pilot wears his hand 12-18 hours a day.
The usual critical points of myoelectric technology apply here: how does the system perform when sweating? How does the stump look after 12 hours of work? Otherwise we are dealing with Otto Bock, where testing should also comprehensively cover possibly problematic warranty handling for normal people (nothing an Otto Bock employee could possibly test). A typical Otto Bock Michelangelo hand problem is that it is too heavy, so posture needs to be tracked for this hand in particular. Stick on registrations points and perform video tracking, later test muscles for tense and painful spots. Not sure what the “sports” label here wants to tell us other than letting us know stuff that does not belong here. But the Otto Bock Michelangelo hand itself, despite being on the large and heavy side, is a beautiful piece of work, packaged and sold by the wrong company. |
| Magnus Niska, OPRA Osseointegration, Truck Driver.
“When I got my first implant system I started to work 100% and my life became normal again.” This system contains osseointegration, as well as implanted nerve connectors. The hand seems to be a standard Otto Bock hand, but the integration to the body of the pilot is unique. Osseointegration is advertised to be a safe and routine type procedure that helps amputees be less dependent. |
Osseointegration itself is proclaimed to be safe for amputees and to give them back independence. So, for skin integrity testing I seriously suggest a 30 day test, with every day seeing two swim session – one morning, one afternoon – in one of Zurich’s public swimming pools such as Hallenbad City or Oerlikon. The skin and tissues may need to be monitored for signs of infection to investigate that claim.
To test whether independence is true, the statement “when I got my first implant system I started to work 100%” is interesting: osseointegration is known to take months if not a year until the implant can be loaded. Obviously, this pilot started work just after getting the implant so he does not at all need (or use) the prosthetic arm for his work. In Switzerland, truck drivers must be able to carry seriously heavy loads so even a minor paralysis of an arm may cause them to lose their truck driver license. In reality, the independence aspect needs to be investigated here: how much wound care products were used over the past years, how many medical and how many technical and prosthetic appointments were necessary here? As the interface is what makes the difference here, it is also the interface should be subjected to testing in this case. Implying a life as truck driver is implying that he lifts heavy freight, which I am quite sure he does not – but “truck driver” is what it says and that is what we are interested in, the symbolic values of this. At this point I may add that also, “smoking” was once hailed as hallmark of extra freedom. |
| Clint Olson, Istituto Italiano di Tecnologia. Social Work.
“Nine months after my amputation, I went rock climbing in Red Rock Canyon, Nevada”. Soft Hand Pro pilot, via Mayo Clinic. https://www.pisatoday.it/cronaca/mano-robotica-softhand-cybathlon.html https://youtu.be/8p_BcrxwO9M (great choice of work glove!) |
This hand has a default tripod grip (very useful feature) and is triggered with a body powered switch (very useful). So it will work under very sweaty conditions, which is extraordinary.
So both posture / limb position independence of controls versus traditional myoelectric hands, as well as the hand’s peculiar tripod grip feature, should be tested specifically. We will never know what made Clint Olson state that rock climbing was a priority when asked about the prosthetic hand. |
| Konstantin Deblikov, Motorica LLC, Journalist.
“The race will be very hard for me because I use two prosthetic hands.” The Motorica Stradivary aims at being a “bionic” hand that is several times cheaper than foreign aequivalent models. The manufacturers state that they want to make a simple hand, not the most complex one. The Cybathlon participation serves as evaluation to see whether the hand is plausibly ready for the market. Links: https://motorica.org/protezirovanie/stradivary/ https://www.youtube.com/watch?v=oCTiM4i5gL0#t=17 |
At that stage, so many open questions.
This hand seems to not coordinate relative finger position, rendering a precise precision grip (d’oh) hard. The videos available imply that. So, as the Kleiber hand and the two “bionic” hands below, precision grip issues and real life relevance have to be weighed against each other. The less advanced the platform, the more dedicated the pilot may have to work with what he has, learning all bugs and problems of a device and finding ways to perform well despite. |
| Kevin Andrew Evision, Imperial College London, IT Professional.
This team seems to just showcase a BeBionic hand. https://www.imperial.ac.uk/engineering/news-and-events/cybathlon/team-imperial/ |
Yes, well, how can we test the promises of a BeBionic hand, or an i-Limb? These both are relatively weak hands with many, many, many grip patterns.
If a glove is worn on such a hand, the glove will have to be thin so as to not block the hand from closing. Such a glove is either made very well, or it is too thin and tears up all the time. So, we could try to come up with a parcours of fast switched grip pattern combinations then see who can switch fastest. Or see how much we can push digits until they break. The Bebionic and iLimb both have safety finger bend mechanisms that makes pushing with extended finger side difficult. Operating light switches is a bit weird with an iLimb as one has to always aim with the knuckle. Generally, I see no point in obsessing over the actual functionality of what clearly is an entertainment device. If anything the iLimb and BeBionic should be tested for their entertainment value.. As both iLimb and BeBionic are commercial devices, they should test whatever we need to know that we cannot test as everyday users because of the restrictive warranty clauses. |
| Bert Pot, Touch Bionics,
“My biggest goal after the accident was to get back on my motorcycle”. This team seems to just showcase an i-Limb hand. |
(see above) |
| Claudia Breidbach, Touch Bionics, Training Manager Touch Bionics.
“Skydiving with her 4Way team KARMA, fitness, snowboarding. This team seems to just showcase an i-Limb hand. |
(see above)¨¨ |
Race report (Gonzo style)
Given this being in our local northern suburb Swiss Arena where I could just take the bus (my home turf, I even occasionally train in the pool there) I went there dressed suitably.
As you already read: to get people involved and to get them talking, absolutely no 80 000 USD wahwah gadget hand is needed.
I wore my Becker hand with a bottle opener ring on it and as was to be expected, I was hit up at the train station by some woman right away. Wearing the right type of outfit definitely works as the ultimate ice breaker, but to make believe that has to be in any way electronic, or, even expensive, proves lack of understanding human communication.
Also, that part has absolutely nothing to do with good engineering which you should read about elsewhere.
Yeah we also read somewhere that the event was “sold out”. Probably was ; ) Those many empty seats during the main arm race event, never mind.

Instead of educating people about intricate control difference of prosthetic arms, this ETH event lacked all actually educative aspects of prosthetic arms, as mentioned above.
The TV commentator even called the body powered arm a “passive prosthesis”. It was certainly a refreshingly uninformed event with that respect. Like, totally punk.
That does not mean it was not funny.
But, more in a childish way. Our tax dollars at work : )

The best view of the race was on TV.
Bob Radocy used a custom America flag colored TRS Grip 5 Evolution prehensor to waltz through the contest with a slow pace, chewing gum, taking each task with ease and great elegance. He thus obviously used a body powered arm and won the Cybathlon prosthetic arm race.
As was to be expected though.
He had had thrown that gauntlet many years before, as since a very long time, the incentives for prosthetic arm sales are skewed massively (see this report from May 5th 2014: ““I’ve thrown the gauntlet down,” he says. “Show me someone who can do something thing better than I can, wearing a myoelectric arm. I’ve tossed down the gauntlet lots of times. The industry isn’t willing to pick it up.” According to Radocy, his body-powered upper-limb prostheses can grasp quicker and with more force than its myoelectric cousins. “I can grasp something in the air,” he says. “You can’t do that with an electronic hand.” And not only can he close and open his hand about as fast as a non-amputee could, he can also feel what he’s picking up. Because the amount of gripping force is coming directly from his body, Radocy can close his eyes and still move whatever he is holding. With a myoelectric hand, that feedback isn’t there—in fact, the most recent advance in hand technology that many celebrated just this month was a hand that could provide some feedback to the user. Radocy already has that, and it’s far cheaper and more reliable than the electronic version. “The high performance prosthesis I wear is a fifth as expensive as the most expensive arm prosthesis. So I can buy five prostheses for the same price as an electronic arm.” (…) While most prosthetists put their patients first, the way the industry is set up incentivizes reaching for that top-shelf prosthesis first. “One of the odd things about prosthetics is that we don’t get paid for our time. We are paid for the device,” explains Steven Hoover, who once worked as a prosthetist and now works on the manufacturing side for College Park, a company that makes prosthetic devices. The more expensive the device, the bigger the prosthetist’s paycheck. The result isn’t surprising—why fit someone with a $30,000 device when you can have them in a $100,000 one that seems fancier and sends you home with a fatter wallet? While Hoover says that the vast majority of prosthetists are honest, “at the end of the day there are still a few people in this field for the wrong reasons.””). This also seems to be a big issue here: skewed incentives.
From my view of rogue punk trash culture representative in the heart of seedy Europe, the rubbery aspect of this rare US-flagged model of the prehensor makes it great to wiggle the light bulb into the lamp socket.


Maybe at some stage we will learn what he really discussed with Swiss TV after his victory here.
After the race, we took it upon ourselves to wait for the hurried winner, congratulated him, and I even offered to buy the very hook from him for an undisclosed sum; he politely declined, but we agreed that he could make me just a similar one, so I mail ordered the race model from TRS. Read about the usage of that elsewhere on this website.
Then we left the Swiss Arena premises and held a really cool inventor-user meeting nearby, to discuss our further ideas and trash culture advances that we would consider. All the while, He (the great organizer, as can be seen on our bar photo) was still on public Swiss TV, telling everyone how it really is. Well who knows. Not that we necessarily share these views, particularly inasmuch as prosthetic arms are concerned.

And at home, I put my own TRS prehensor (pretty much the same gripper as the one Bob used in the Cybathlon) on and we made some cheese fondue. As you may know, Swiss cheese fondue originated from people in the mountains melting left over cheese bits. Wearing a local culture shirt. A cheers to more trash culture.

In a prequel to all of this, we also discussed the history and initial intent of the Cybathlon prosthetic arm race [link]; history of that event has it that it was specifically designed by Professor Robert Riener to make myoelectric prostheses win and to make other designs fail, anecdotally in the wake of a failed NCCR participation, at least, failed with regard to prosthetic arms [link]. They were set on using the SHAP, which that caused me to critically discuss this, which then lead to writing an invited opinion in the OANDP press [link]. Upon me learning that this Cybathlon was to take place, which must have been around 2014/15, I saw to it that the organizer would also allow body powered prostheses to compete, which He was happy to do, particularly as it seemed that He then was still unaware of the (later) fact that body powered prostheses won both the 2016 and 2020 Cybathlon prosthetic arm race. Me, as extremely experienced wearer and tweaker of both technologies (as was published later and explained in detail only then [link]), knew already then, that body-powered prostheses are superior across a range of relevant use aspects in any real life and real work situation [link], but without own skin in the game and without understanding details and deep explanations, He must have thought that I was probably a bit crazy, which is an assumption not without its own perils [link], which, I would acknowledge, may have not been without a bit of intention by me then. Why would I dress up or make myself believable through uncanny efforts when being apparently epistemically underestimated and inconvenienced may open so many more doors [link]. Also I insisted, that the SHAP was not relevant from a user perspective, and, that, instead, simple everyday tasks should be tested. The fact that they perform everyday tasks for that Cybathlon prosthetic arm race originated as my idea [history see here].
Race detail analysis – grips and actions, errors and why [#cybathlon – what the ETH engineers and Swiss Television should have done to make this less of a Circus and more of a science event]
Usually, robotics researchers are more interested in just having some hand looking thingy around without worrying about the mind boggling socket, suspension, control or grip problems too much.
Usually, funding bodies and media boost each other in the current belief that “a lot of research is being done”.
They lack technical insight, understanding and interest, and they usually need prosthetic and robot hands as decoration such as shown here on the front page of NCCR Robotics. If you read the headers and tags, you will associate wrongly:
(C) Copyright NCCR Robotics

You will associate with the robotic hand as shown here, that:
- prosthetic hands can be as elegant and gadget like as shown here; that is not a reality that any amputee has or will have;
- “intelligent robots for improving the quality of life” suggests that this robot hand in some way actually is an intelligent way to actually improve actual quality of an actual life – and other than trying to improve the life of Swiss National Foundation research funds recipients, no arm amputee’s life is improved at all, also because these solutions are not an intelligent choice for improving actual qualities of an actual life;
- “research”, “education” and “tech transfer” actually relate to prosthetic hands but they do not; there is absolutely nothing that NCCR robotics has to show regarding prosthetic hands that improve any arm amputee’s quality of life, like, at all;
- “wearable robots” in conjunction with that image suggests that there are, in fact, wearable robots that can act as prosthetic hands when in reality, the NCCR Robotics neither developed nor sells anything remotely close to that;
Now there is a nasty twist here.
Usually, prosthetic technicians are happy with anything that costs a lot and they can bill for added 30%.
Clearly, higher product cost is much in their interest. They may be interested in solving problems only once bills are paid, and, products are sold.
They told me once that a prosthetic arm that is 3 cm too long is “not a problem” and “cannot be fixed” – until I intervened to halt insurance payment, upon which all of a sudden the problem “could be solved”.
Later I asked them whether they could put a 4 x AA rechargable battery mount on my myoelectric test socket rather than a mount for the massively overpriced Otto Bock rechargeable batteries, and they said, no, because the prosthetic hand would not work. I told them to go ahead all the same and as we all know, average prosthetic hands work just fine with a 4 x AA battery setup. I told them and said, did you know this would work? They said, yes sure of course we knew, but we just did not tell you.
So don’t expect too much on that front. Cooperation with prosthetic technicians may often be just about business, income, bucks per unit – and that is fine as long as everyone is sky clear about it. They know that body powered arms are going far further in severe work environments than myoelectric arms, but if they can sell one and only one unit to an amputee, let that be the one with the highest price. And that is not their fault – it is an incentive based issue.
Usually, prosthetic part manufacturers want to sell stuff that breaks, even when not used (see: iLimb gloves) for prices up to a small house or a few cars (iLimb glove that lasts a few minutes: 700 bucks; iLimb: 80 000 bucks: Otto Bock Michelangelo hand: 120 000 bucks) and include funny warranty clauses that exclude all use by default.
Whenever their puppies crap out, which essentially is, like, all the time, they tend to recommend “therapeutically accompanied training”. Otto Bock and Touch Bionics, in particular.
I used Otto Bock hooks for work, normal everyday work. I never thought anything about it. These hooks started to wiggle fast. Real fast, several weeks to a few months and they would wiggle. The fine print said, good for heavy work and robust, but not for extreme sports such as rock climbing. We sent the wiggling hooks in, and they said that the combination of lack of scratch marks and massive wiggle would indicate extreme sport usage. At that moment I knew we could not count on these guys. Like, ever. I work in forensic medicine and lift around and handle bodies, which weigh around as much as I weigh – so the hook usually is exposed to soft surfaces (hence the lack of scratch marks), full body weight type weights (hence the correct usage for daily work) which it was not built for (hence the warranty exclusion for climbing).

Never in their life (“Otto Bock – Quality for Life”? “Falling apart within seconds, minutes, days and weeks”!) would these people ever have figured that a user like me reads their advertising (“robust”, “hard work”) and uses it for, well how to put that politely, umm, … “hard work”. As I felt betrayed I felt as if we owed the world an explanation. How come that past the year 2008, I need a prosthetic arm for real work, but no one has one that works for me, out of the box? Who saw to this beforehand? Who promised us better arms? Who failed along the lines of decades of missed opportunities? Where did academic thinking go wrong? What desires were served instead? We then found the Otto Bock Movo hook 2Grip (that “modern” item back then) to contain non-parallel joint surfaces and a hook claw joint suspended with a PVC disc, filled with abrasive dirt; who ever branded that hook with a “CE” logo, and who put into the manual “service free”, defeats me to this day. So we put brass inlays (ausgebuchst mit Messing) into these to make the joint surfaces parallel. There were then issues of tuning spring length to hook body deformations due to the spring lever damaging the body mildly, causing thin object grip failure. Shortening the springs was the solution to that, which I had to suggest to them. Wee. Why could they not just build a hook that works.
So it seemed to me like they usually leave the actual technical analysis of prosthetic grippers, hooks, devices and hands to amputees. Technical analysis, technical problem definition, trouble shooting, academic critique, critical reviews – all left to the amputee community.
They also leave all socket and suspension related troubleshooting to amputees.
In the end, they are also not interested in integrating amputees in their development process. As stated, their agendas are usually rather different from solving arm amputees’ needs and problems. How though can anyone within any researcher, developer or manufacturer community be even mildy upset when I point my finger on that? They weren’t here to begin with. So this is not their terrain. This is territorially speaking my terrain (and you forgot AGAIN what this website was called, just now, right?).
Ultimately, researchers as well as other industry representatives may even view amputees as sub-human idiots that urgently require shape restoration to approximate their human appearance and nature, due to which amputees also cannot be humans that argue on an equal level.
So by sociological self definition, robot and other industrial researchers can never accept an arm amputee as a human being, which then degrades their attempts to the likes of some type of robo-zoology rather than human medicine; this may be why prosthetic hand development even within the field of robotics is looked down upon so much.
It really is a field to stay away from, and if only for reasons of social rank: the subtleties of what it means to bow to the needs of physically handicapped people are wicked, mean and ugly. Also, the actual problems are wicked, mean and ugly.
When you test plastics regading their interaction with sweat, to see which materials stink more, or less, you will find that the problem is not solved even for the massively large markets of sneakers. The reason is that no self respecting researcher wants a “sweat-stink” lab. At the same time, you all look down on amputees that sweat. I can easily tell from your faces. Easily. And I can tell you what logical connections – these two issues connect, logically – at that very moment you did not make. After all this is a cognitive competition and you are reading this here, first. You are reading a lot of things here for the first time. Not that it is not about time.
When you test prosthetic sockets and suspensions for skin damage, you basically will spend your weeks and months documenting abraded, blistered, inflamed, chafed and smelly stumps. That is a mixture of totally not funny (as such), totally not funny (the visuals can even make amputees nauseous, we have support forums where posting pictures of chafed stumps wito is not accepted) and not funny (the smell). Trying to get an ethics committee approve is a challenge in itself.
When you test grip control failure rates to see whether an expensive DSLR camera is dropped, it can be performed with an already defective DSLR camera (as quite possibly you do not want your amputee research subject to wreck your expensive DSLR camera). No researcher, all by themselves, so far, managed to realize that we amputees are exactly the same with our expensive DSLR cameras. We also do not want us, the amputee research subject (or what was the product management you all tried on us again? “project management by Banana – the product matures after sales”?), to drop these cameras. So what do you think I do with my camera? “Let me see whether, again, the camera falls down when I try to hold it with this prosthetic arm”? Do you think any myoelectric arm control can ever be better than what professional users showed you at the Cybathlon? Did you really watch closely at that prosthetic arm race? Do you understand and are you able to cogently answer all questions regarding control failure from the Cybathlon footage? For sure? Enough 3D registration points for full motion tracking? All 3D models built and cinematically reconstructed? So, you see, it is not that there aren’t any real questions. It is just that the amputees are left alone with these, even now.
At the same time they try to build neural network intelligence to run their robots rather than developing any people skills, like, to recognize intelligent behavior in amputees. Or to develop robots with empathy.
Posture effect or limb positioning effect to interfere with wire loop task in myoelectric arm
As the body motions and corrective limb motions are subtle, it pays to closely observe the differences across still images.
What we see here is an iLimb (Touchbionics) user fail at the wire loop test. The relevant question is, why.
The answer will be – and, as one can observe, is – that the joint extension and increased tension around the elbow, even only an extremely subtle one, will open this hand even though the user does not want this.
This has been studied and documented before (December 2014).
When I had asked the Touch Bionics representatives at a workshop where they presented “solutions” to our problems, they said I needed “therapeutic training” to “overcome” this and that this was no problem.
It is a fact that not even an employee of Touch Bionics as in the below demonstration, that has all the time in the world to “overcome” this, not even an employee of Touch Bionics can master this.
As it is an inherent problem of bi-electrodal myoelectric conventional control that can *not* be “overcome”.
An employee of Touch Bionics employs her iLimb prosthetic hand to attempt the wire loop test.
(C) Copyright SF DRS Swiss television





The best way to totally avoid limb position effect is to keep a stiff elbow.The reason is that bending or even extending the elbow can cause involuntary hand function to occur, so not bending or extending the elbow seems like a plausible solution.
To still be able to move the loop over the wire, thus, the Touch Bionics employee who performs this contest here performs a subtle length axis rotation of her upper body towards her left.
Due to a rotation being circular and the wire being straight, obvious misalignment between the loop and the wire is to be expected.


From the above to the below image, you want to watch where (inside the loop) the wire is crossing. Between both images, a minute shift of the loop / ring away from the user is seen, placing the loop at a slightly increased risk of touching the wire.
If you watch closely you will see that the wire moves slightly below and to the right of the circular loop’s center – enough to make the user nervous and motivate them to provide a corrective limb movement.
The reason for that is because the user has a stiff arm and rotates through the upper body’s vertical axis, performing a rotation to the user’s left side to advance the loop over the wire.
The way to correct this rotational problem would be by core torso muscle action, or, through bending or extending the elbow, which – due to the limb positioning effect that is so well known – risks of inadvertently opening the prosthetic hand.

And that is exactly what happens.
The user leans back with the shoulders, while the elbow is slightly extended.
From the above to the below image, the subtle difference in position is the relative position of the wrist to the shirt creases above it, and the relative position of the collar to the wire loop in front.
With that, the wrist can be observed to relatively move forward relative to her body position, which is an effect of the arm pushing forward with minimal elbow extension.
The user cannot other but stretch the arm a bit to find a less awkward shoulder and arm position to see this through.
And then, typically by having the brachioradial muscle activate the lateral / exterior electrode usually used for extensor muscles of the stump whose activation opens the hand, the hand opens when it should have stayed closed.
And that is exactly what happens in the next picture. Here you can see that ever so subtly the fingers already open and the hand lets go of the handle.

Now the device lights up as the loop touches the wire.

At that moment, that part of the race is lost as the loop touches the wire.
The animated sequence shows that towards the end of the motion where the error is made, a slight leftward leaning or back motion of the shoulder with minimal elbow extension triggers the positional interference.

A very useful trick to reduce these failure instances to 1/3 or so is to swap extensor and flexor electrodes.
That could have been part of the pre-race discussion with critical people such as me.
My own prosthetic “bionic” arm with the iLimb features reverse electrode attachment and when I extend the arm, my prosthetic “bionic” hand closes. So I get far less irritating or use-critical interference from posture just by that. That still does not away with these interferences as such, and they are still a real nuisance, but at least there is extensor side stability with regard to unintentional grip opening and object droping. It reduces these interference situations to maybe 1/3.
Touch Bionics just recommends “therapeutic training” – and look where it got them!?
The heats / qualification races show that the wire loop sequence (indicated as second race part with a “102” point label) was failed by all wearers of myoelectric technology. That means that none was aware of a daily problem that can be fixed simply by reversing the electrode / device close-open assignment. That also means they rather spend thousands of USD on registering and training their “pilots” or Cybathlon prosthetic arm race competitors and have them fail, rather than listening to the arm amputees that tell them what’s up. That, then, indicates that they prioritize social status (at the top: assertive sales representatives without disability and at the bottom: any arm amputee that believes they may know something better) over technical insight.
Cybathlon prosthetic arm race also shows that the multielectrode myoelectric arms (that will have a lot of really bad noisy signals to disambiguate) failed a number of other tests (Deblikov, Maeda, Letain).
So, research in myoelectric arms could focus on these issues:
- the myoelectric technology contains some real muddy signals,
- and it is combined with some not so useful socket technology
The market is absolutely tiny and those that have concluded they do not need these arms, may be far too critical and experienced to make for good clients to buy more ill devised trash parts (to put it bluntly).
I am not saying that it is entirely impossible to eek out top performance with myoelectric technology. But I am saying that has not been done yet. Also I am saying that if one is eeking out top performance of both myoelectric and body-powered prostheses, then, body-powered will probably win for any real work situation.
(C) Copyright SF DRS Swiss television



Another way to solve this will be through more electronic parts – biceps electrode, motion sensors, that type of thing. But limb positioning effect really messes up your day with myoelectric arms. As well as sweat, and so on.
The surgery that Mayrhofer was reported to have had, targeted muscle reinnervation, is thought to improve signal quality. As TMR only reallocates stump muscles but does not detach muscles that belong to the elbow including the ones that bend it, however, the same anatomico-functional interference is also to be expected there. And without surprise, also Mayhofer failed the wire loop test.
You can only actually observe this from the video footage if you already know what is happening and for that, you must have failed this a few times yourself, and you must have understood the problem from its origin.
The body powered arm with the TRS Prehensor that is worn by Bob Radocy does not the slightest bit suffer from that problem: it is controlled, mechanically, by a wire.
This is not obvious to many.
When I let Touch Bionics know that I am also wearing the TRS Prehensor very often now, they said I needed “therapeutic training” and that I otherwise risk to get “Fehlersignale” (wrong electrical signals).
It is a bit curious and surprising that they probably even do not understand the technology that they lost against.
How can they assume that wearing a TRS Prehensor is subject to wrong electrical signals?
How can they solve problems, if they do not have a basic knowledge of the field that they work in? What is a rhetorical question?
On the other hand, that explains a lot also about other issues that I had with the iLimb.
If the Cybathlon only exposed that massive amount of absent knowledge, then it has achieved a lot.
Looking left and right, I guess this exposes a lot more than the organizers or participants had wished for.
But let us examine the performance of the body powered arm on the wire loop to see how that worked:
Body powered arm, unaffected by body and limb position, delivers a perfect performance
(C) Copyright SF DRS Swiss television


Ultimately, the wire loop or hot wire test did not expose problems with wrist control. It exposed positional interference. And that means that the organizers did not understand the testing procedure to begin with.
They just offered an obstacle and everyone was surprised in the way that obstacle differentiated between the participants. And mind you, I am not saying this is a popular trash culture circus without reason.
Cutting bread and failure of a number of myoelectric users
Cutting bread typically requires attention to a number of aspects.
Quite importantly, the loaf needs to be left behind in a reasonably good state so more bread can be cut, and even though the Cybathlon organizers were nice enough to just place relaxed requirements as to how that bread should be cut, that does not mean this is not a documentation of the limitations and problems of prosthetic arms that is a lot harder to negotiate than one would wish for.
Myoelectric hand user 1: indenting bread loaf, throwing slice to ground
Here, Magnus Niska manages by compressing the bread loaf with the whole prosthetic hand; no effort is made to open the hand to stabilize the loaf as it should be done in instances where the rest of the loaf is supposed to maintain a loaf shape. The slice then is thrown to the ground.
(C) Copyright SF DRS Swiss television








In the next image, the bread slice is thrown to the ground after cutting the bread. Also, the bread loaf is now seriously indented.
This is no way to cut a bread in any social setting. And yet, these prosthetic hands are advertised and sold as “social” and “communicative”.
Fact is, their unreliable and difficult performance may force a user into a behavior that may result in damaging items and not being careful and respectful with items.
The Cybathlon vividly illlustrates several such instances, all of which are similar.
A myoelectric arm may in fact motivate or even enforce some asocial behavior, as long as one submits to the credo that an animal can only be as free as its cage allows, with a myoelectric arm representing a type of a constraint, a type of cage.

Myoelectric hand user 2: using elbow to lean down on loaf by Touch Bionics employee and ambassador user
Here, Claudia Breidbach of Touch Bionics simply leans onto her bread loaf to cut the piece off.
Her elbow is pushed into the loaf with her full body weight.
She does not even use her iLimb hand for that.
I recommend that she obtains therapeutic training for bread cutting, whereas it is advisable that she holds the knife with her prosthetic iLimb hand while fixing the bread with the other hand.
(C) Copyright SF DRS Swiss television









Myoelectric hand user 3: cutting bread by using prosthetic arm to lean onto loaf
Wade Daniel Letain with the sophisticated SFU myeolectric hand can be seen here “butchering” the bread by totally deforming it.
I can do that without any prosthetic arm on and still not damage the loaf quite as hard.
That is why I had suggested to the organizers several times to include – as a base line performance indicator – two handed normally configured people, and arm amputees without a prosthetic arm on, just to see how much different the prosthetic arms perform.
Only from appreciating these hard to swallow pictures and videos will you understand why an arm amputee is better off (no irritating malfunction, no extra weight, no sweating or skin irritation under the socket, leave alone the absolutely horrendous costs of the myoelectric arms) *not* wearing any of these prosthetic arms with myoelectric controls.
You have to realize that these pilots do not resort to slaughtering these bread loaves because of laziness or lack of motivation.
It is just that their devices don’t work.
Particularly under sweaty conditions.
I sweat at work (link) and I performed a very, very detailed analytic report about it.
There are no surprises why myoelectric technology does not perform with exception of a few rare occasions. It does have its role, but who knows what that is.
(C) Copyright SF DRS Swiss television









Myoelectric user 4: good result
The Otto Bock Michelangelo hand, despite being a bit too heavy and maybe too large for many users, offers a few advantages over the other hands.
Also, Mayrhofer that is the user featuring the hand, seems to be a very thoughtful, respectful and careful person and despite there being time pressure, he performed the tasks very cleanly and well.
The bread here has been cut with diligence and care, the loaf is not deformed.
I do admire his performance.
(C) Copyright SF DRS Swiss television

Body powered arm: perfectly cut bread, perfectly shaped loaf left behind
The body powered arm left a very good impression also with this task – proverbially speaking.
One reason for this is that the control can be very finely adjusted and there is sufficient sensory feedback for this task that is real time and finely graded.
When I cut bread at home using Bob Radocy’s TRS Prehensor (the man performing here and winning this Cybathlon race *is* Bob Radocy, and he invented and sells the TRS Prehensor as one of his top performance products; watching this one can understand why) the bread remains in a good quality and the slices are perfect.
As opposed to myoelectric technology, this works reliably and without postural interference.
(C) Copyright SF DRS Swiss television





Myoelectric total control failure – zipping up zippers
The iLimb and its controls are simply not reliable, no matter how much a professional Touch Bionics user such as here, at the Cybathlon, tries to make us believe.
As you can see, a real application with a bit of sweat will simply and sadly – just fail.
The hand seems to not only not hold on to the fabric to close the zipper.
It then also gets tangled up a bit with the fabric so the fingers hold on to the jacket still why the user is trying to get away from the jacket to walk to the next task.
It hurts to watch Claudia Breidbach struggle. Possibly, therapeutic training exposure will improve her handling problems.
(C) Copyright SF DRS Swiss television

It seems that a two finger extension push down method is elegantly chosen to fix the fabric in an attempt to close the zipper.



To reiterate, I seriously recommend therapeutic training possibly by professionals at Touch Bionics to this user, as moving any item to the mouth while wearing “the new standard for myoelectric prostheses” (as Touch Bionics advertises for whom this user works) is definitely not acceptable.

After finding a better angle with the mouth, the zipper now seems to hold on for closing.

Getting fabric tensed up so the zipper can run up better is a good idea.


Now, the fingers seem to have gotten entangled with the fabric.

The jacket still is somehow attached to the fingers.
Quite possibly, the hand cannot let go at this moment as the user moves her arm. So another instance of positional interference with what should have been an elegant demonstration of advanced myeoelectric control.

This, however and in my experience, is a very everyday problem.
In my life, the hand locks up and withstands grip change even when I am just trying to take out a trash bag.
It is quite simply that the myoelectric controls are seriously constrained and in that, present a less than desirable interface, and pretending otherwise is tantamount to Riding A Dead Horse.
The myoelectric control rates that were academically published have not improved, but mildly deteriorated, between 1980 and now, i.e., over four decades (details see link).
But nothing, as I was told by Touch Bionics, that good old “therapeutic training” cannot fix. Why not try it on their own pilots some day.
Clothespin test and other precision grip problems
Lack of “raw power” of Touch Bionics iLimb causing Cybabthlon test failures
The iLimb does not just lack “raw power”. It does not possess any power, like, at all. It really does not geometrically grip in any true to life work sense. It is more of an impediment for many activities including baking a cake. This is totally well known: the “bionic chef” did not manage to open a pop corn bag back in the days, and now, Touch Bionics’ employees themselves showed their problem, their lacking ability to firmly grasp.
The task here consists in completely removing the lid from the glass. The Touch Bionics employee here stands no chance of completing this task.

The following image sequence shows how the iLimb is used by a Touch Bionics employee that utterly fails in both grasping and elegantly handling the cone in some other way. Really, this are very clumsy attempts at operating a hand that Touch Bionics advertises with the bold slogan “this full hand prosthetic device closely mimics the appearance and function of a natural hand”.
Now, watch how this prosthetic device tries to mimic the appearance and function of a natural hand as demonstrated by a Touch Bionics employee.

At this stage, I definitely recommend both Touch Bionics users, Bert Pot and Claudia Breidbach, to at least attempt to undergo from significantly enhanced “therapeutically accompanied prosthetic usage training”. This shall make it a lot easier for them to handle their prosthetic arm systems. As we see, there is significant need for significant improvement, unfortunately even at this stage.
Precision grip failing with unsynchronized fingers – a well known “bionic” hand and iLimb problem
The absence of an always repeatable, always reliable precision grip of the iLimb has been a discovery of me early on: I had been stitching a label pocket back onto my sports and travel bag, and the iLimb did not provide a useful grip.
During the Touch Bionics “work shop”, they recommended I take some “training class” or so and gave me some “tips”. As if they knew it any better.
When we discussed how to change a bicycle tire or tube, a Dutch employee or ambassador or key user or marketing type user person of sorts, of Touch Bionics (whose performance on clothespins is detailed below), said it was not possible and one had to take the wheel to the bike shop.
Funny, with my prosthetic body powered arm or even without prosthesis on, I installed brake levers, adjustable seat posts with cable spring release mechanisms, and definitely switched tires during holidays with various terrain requirements a few times a week, all myself and unaided by others.
That would be the nature of workshops – exchange, and, learning from each other.
But what better than to watch the pilot of Touch Bionics, perform that precision grip himself.
As I said: this is not only a well known problem, it also has specific reasons.
(C) Copyright SF DRS SRF Swiss television
Here, he fails to apply a precision grip to the fabric. The thumb tip does not close to the index finger tip, despite repeated attempts of the user.
He cannot but fail with a hand like that. The reason is that the motors of thumb and index finger lack proper synchronization, or in other words, the hand was never built to do this properly.

Here we can see another problem of the “precision” grip with an iLimb: the geometry of the fingers and the geometry of the clothespin do not yield a reliable dynamic geometrical grasp space. Much rather, things escalate rapidly.





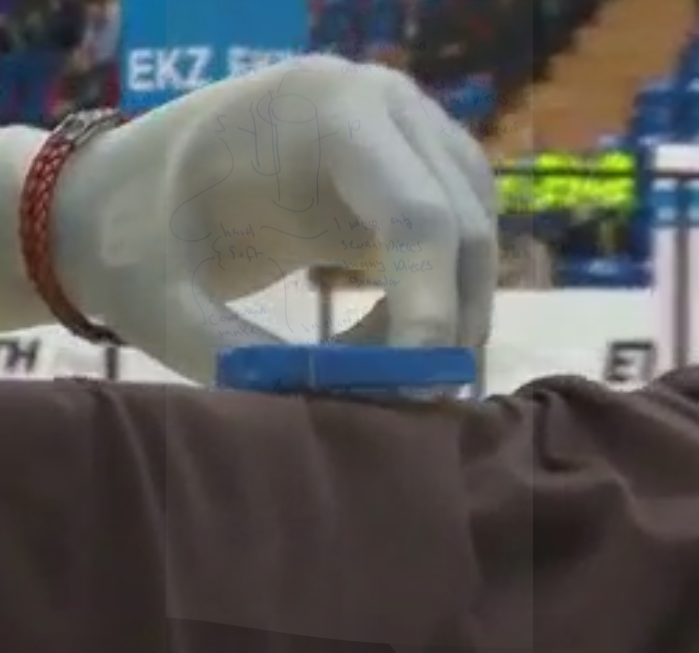
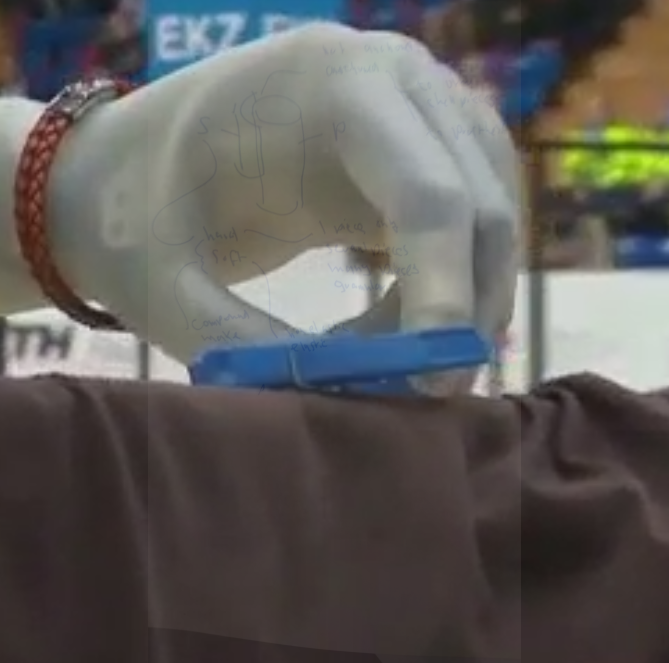
What you can observe here is
- that to apply forces to the clothespin, pressure needs to be applied in a mostly orthogonal direction onto the clips or handles
- and with this particular clothespin (however, not with others, such as the really cheap ones I got at home), the plane direction of the handle surfaces and thus the orthogonal vector directions are not parallel but tilted
- and the fingers – most notably the “relevant” fingers for the precision grip – opposing each other do not do so in parallel directions either; much rather, both their static angles are variable throughout the whole hand operation, and vary with every new finger position, complicated by the fact that the user has absolutely no control about the details of that configuration quite simply because the finger motions are not coordinated or synchronized
- so the hand has no predictable configuration but varies in relevant dimensions
The problem is extremely relevant for all small objects and it is also well known in literature (see citation here). Read this post about a far more detailed approach.
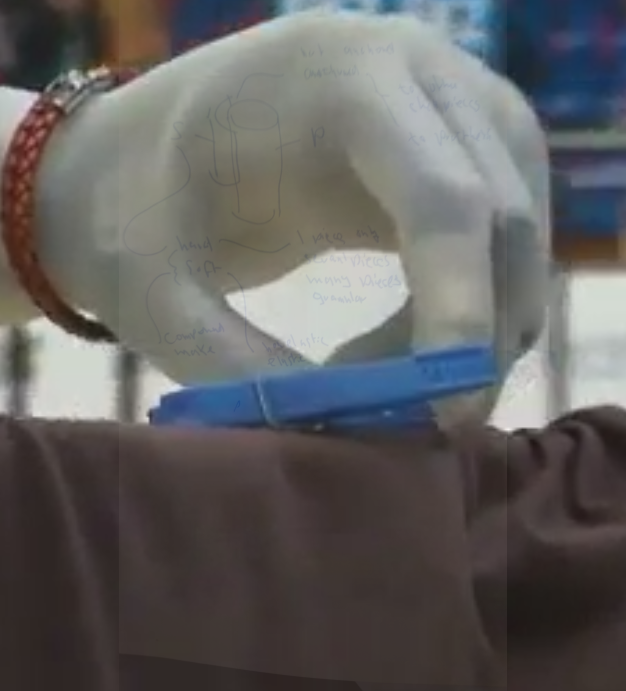

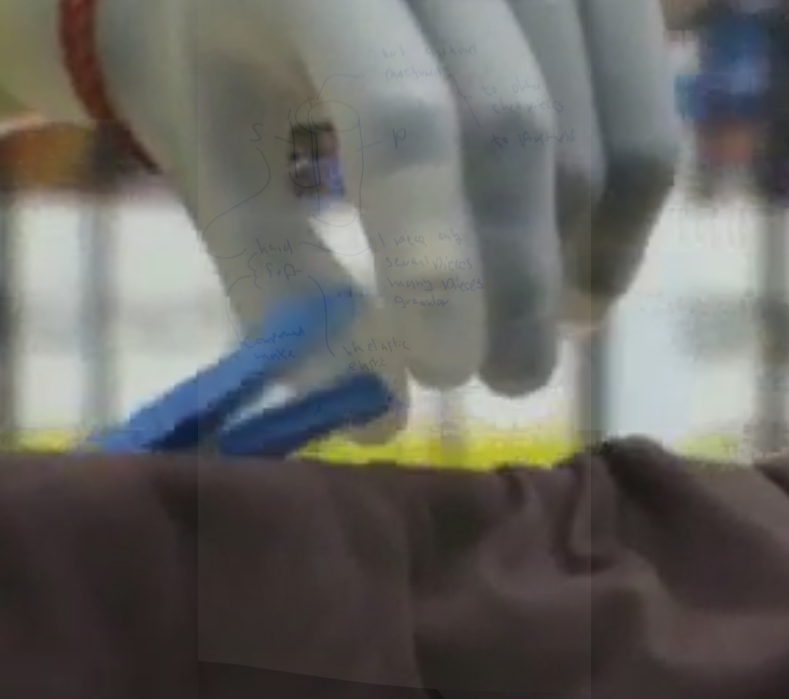
The clothespin test was not designed to highlight differences between unreliable grip geometry and reliable or predicitable grip geometry. But it exposed just that. With that, we have another obstacle that the organizers placed there without any understanding of what it would achieve, exactly. The absence of testing, proofing, assessing rationale is astounding. I have always been of the opinion that these time assessments, and these quality assessments, were highly problematic from a standardization view point. On top, arm amputees can only be compared when competing against themselves – with different prosthetic solutions, or before and after training. Not between each other, simply because the situations are too different. Circus style rile-up for pure entertainment thus defies academic logic once more.
So, having everyone play with clothespins is cool – but the guy without flexion of the wrist and without intricate multi finger control won, so, not sure you all understood the clothespin test. Or, prosthetic grippers.
Precision grip succeeding with predictable rigid grip geometry: body powered TRS prehensor
The TRS Prehensor just as all hooks used for prosthetic arms has a very clear, known, stable and fully repeatable grip dynamic.
The user will be able to rely on the grip surface being in the same relative angles during the whole grip phase. The hooks being that way can be read up in more detail here.
(C) Copyright SF DRS Swiss television

However, I still do not understand how also these problems that we encountered here would require an event of the magnitude of a Cybathlon to be brought to daylight.
“Mommy, do I have to repeat every mistake others made before me myself?” – “Yes, one can learn so much from mistakes”.
A simple visit to my website with videos and images from my own cellar from a Zurich suburb would have been massively more economical, cheaper and, quite possibly, insightful. Check the Yenga / grip mechanics analysis where that and a lot more is written about this.
So, summing up, it is just because of an unbelievable degree of preoccupation with the myoelectric “bionic” hype, that engineers and media “believe” these to be “better”.
The reality is different.
The organizers (Riener, Gassert, Wolf) also made it very clear to me that they regarded my body powered arm as part of “stale technology”, neither acknowledging nor understanding that it is the far more advanced, far more user driven and far more intelligently built system than any of the others [technical report with comparison here].
They tried to invite me twice to stand in front of their “Captain Hook” exhibition so people could laugh at me. That is some serious shit! I am still not sure what type of flogging that type of total lack of empathy and respect deserves but it proves one thing: these guys are not a bit about respect, they know Zilch about prosthetic arm design, and they sure lack attitude.
Trash culture in a pure form! All the while, I wrote up prosthetic arm design revision in a real working environment, how it really is. Serious, too.
Of course, unforgiving critical appraisal is key to improving products and so the next urgent question is: why do proponents of myoelectric arms not appreciate unforgiving critical appraisal?
The answer to that is wicked; either you want to help amputees on eye level, at the same height, with respect and focus on improving prostheses.
Then it will probably not take you long to see the massive advantage of body powered over myoelectric (which suffers from intractable or opposing problems that cannot be solved or evened out) (what again was the title of this weblog? awww, forgot it again?).
Or, you believe that you are called upon by higher powers and need to “heal amputees” possibly by “giving them a really good robotic hand back to restore their status as humans” – thus, degrading us to not-quite-human in an unequipped state, and, thus, being unable to accept our views or feedback. Because of the nonhuman-human-hand dependency constraint that you operate under.
There is a deeply narcissistic element about robot engineers and industry representatives with regard to these hands (even the product name “Michelangelo” hand comes across as arrogant in its blasphemy) that in the last 5 decades never identified leave alone resolved the above mentioned systematic problems.
After all, also this analysis will probably leave the rest of the world largely untouched by rational thought, free of critical analysis, and positively encouraged to keep trucking without properly going at relevant problems.
So quite possibly, the actual question now is whether a psychiatrist, priest or fortune teller can talk robotic engineers out of perpetuating nonsense and accept the fact that arm amputees also may suffer from myoelectric technology as a cursed promise that hardly ever delivers when push comes to shove. It would be nice to have hype and actual orthopedic support to overlap, technically. If the media and technical engineers researching this would just hype up body powered arms a lot more, it would do the arm amputee community a lot of good and help prevent back and neck problems as well as overuse strain stuff.
But then that is a cognitive thing and we already established that this was not a cognitive Circus event but something else.
It was something entirely different altogether.
The roles of the various circus participants remained somewhat obscure to the end. Who really gained from this? Why would anyone give anything about my blistered abraded smelly ass stump?
What is in it, for these people? What are they really doing there?

Race results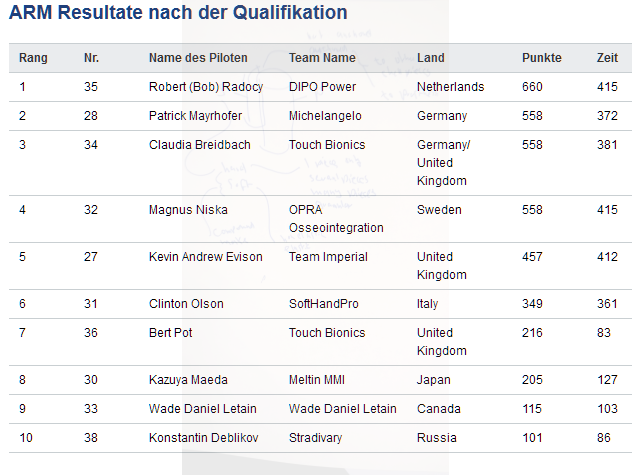

Summary
The Cybathlon prosthetic arms race is a pure Trash Culture event, that reams pilots for their hard earned money and makes them perform spectacular feats such as cutting bread or opening a door without even offering insurance. It actively avoids technical analysis and thus avoids chances for technical improvements.
As so very often in academc forays into prosthetic research, true technical analysis and provision of improvements is left to the user.
When I read that they charge 2500 bucks for “pilot” (that was how they call the door opening guy with the prosthetic arm) and assistant (basically the one with an oil can and a screw driver) I was mildly amused.
“Inclusion”, they said : )
Total lack of research focus or follow up
The Cybathlon was announced as competition that allows visitors to “understand the issues surrounding disability in a practical way”. When not even the organizers understand these issues, and not even in a theoretical way, how on earth can they assume an ability to instruct visitors so they understand disability issues? What is a polite word for total arrogance?
They state “the objectives of CYBATHLON are to promote the research, development and implementation of assistive technologies for people with disabilities”. I say, they show an apalling lack of technical research proficiency and this is a trash culture circus event for weird people to stare at people with a handicap. A freak show. Without the tiniest surprise, we find there to be absolutely no sign of Cybathlon after-race analysis of the relevant technical issues of the prosthetic arm race presented at the ISPO 2017 (link), or, at the MEC 2017 (link).

You go to the ETH for Circus events – but you come here to get the details explained – and that is how it should be.
Detailed comments about the specific hands, that one would have expected from a more research oriented organization committee, were supplemented by me, and now are listed in the above table.
Sociologically, and with its current focus, and with respect to the details of actual research, this event takes us back at least a few decades if not a century. So the proper research domain for this event and its associated meanings is not technical but social.
Really, we see social and sociological collapses shaping the rise of these machine hands whose problem list is long and contains several glass wall type roadblocks. Twice, the Cybathlon organizers (Riener, Gassert, Wolf) asked me / had me asked to present my body powered hook at their “stale old technology” exhibition. This clearly indicates they are not at all in it for any technical research but for pure entertainment value. And not just that: it shows that a social perception of a hook being “stale old technology” is man made, it is made by them, the perception shaping is theirs to make, and their goal. Conversely and if you understand the technology, acting against observed and measured performance using social belief systems to ridicule a mechanical prosthetic arm is not worthy of a modern technical university. Instead of a relevant task selection and application, a normative approach is taken that does not respect the significant differences between arm amputees (with and without powered wrist, above) and prosthetic arm designs (details above). The details of what goes on in this event takes us back decades if not a century, and clearly labels the organizers as belonging to a demagogic belief system, rather than a rationally motivated constructor domain – as all constructors with a true constructor heart – like me – go for the machine bits, the clockwork inside. And we go for the significance domain.

Not that I find good old popular culture with Circus, freak shows and strongmen a bad thing to get people talking: it just can be had so much more cheaply.
Like, check out my mannequin arm, see above!
Links – Cybathlon – Twitter – Wikipedia – Youtube – Facebook – Stiftung MyHandicap – BBC
